































Abderahman Rejeb a , Alireza Abdollahi b , Karim Rejeb c , Horst Treiblmaier d,
- a នាយកដ្ឋានគ្រប់គ្រង និងច្បាប់ មហាវិទ្យាល័យសេដ្ឋកិច្ច សាកលវិទ្យាល័យ Rome Tor Vergata, Via Columbia, 2, Rome 00133, Italy
- b នាយកដ្ឋានគ្រប់គ្រងពាណិជ្ជកម្ម មហាវិទ្យាល័យគ្រប់គ្រង សាកលវិទ្យាល័យ Kharazmi 1599964511 ទីក្រុង Tehran ប្រទេសអ៊ីរ៉ង់
- c មហាវិទ្យាល័យវិទ្យាសាស្ត្រ Bizerte, សាកលវិទ្យាល័យ Carthage, Zarzouna, 7021 Bizerte, Tunisia
- d សាលាគ្រប់គ្រងអន្តរជាតិ សាកលវិទ្យាល័យ Modul Vienna, Am Kahlenberg 1, 1190 Vienna, Austria
| ព័ត៌មានអត្ថបទ | អរូបី |
| ពាក្យគន្លឹះ: ដាច់អយស្ម័យយាន UAV កសិកម្មជាក់លាក់ អ៊ីនធឺណិតនៃវត្ថុ Bibliometrics | យន្តហោះគ្មានមនុស្សបើក ដែលត្រូវបានគេហៅថា Unmanned Aerial Vehicles (UAV) បានឃើញការអភិវឌ្ឍន៍គួរឲ្យកត់សម្គាល់ក្នុងប៉ុន្មានទសវត្សរ៍ថ្មីៗនេះ។ ក្នុងវិស័យកសិកម្ម ពួកគេបានផ្លាស់ប្តូរការអនុវត្តកសិកម្ម ដោយផ្តល់ជូនកសិករនូវការសន្សំការចំណាយយ៉ាងច្រើន កើនឡើង ប្រសិទ្ធភាពប្រតិបត្តិការ និងប្រាក់ចំណេញកាន់តែប្រសើរ។ ក្នុងរយៈពេលប៉ុន្មានទសវត្សរ៍កន្លងមកនេះ ប្រធានបទនៃយន្តហោះគ្មានមនុស្សបើកកសិកម្មមាន ទាក់ទាញការយកចិត្តទុកដាក់ក្នុងការសិក្សាគួរឱ្យកត់សម្គាល់។ ដូច្នេះហើយ យើងធ្វើការត្រួតពិនិត្យយ៉ាងទូលំទូលាយដោយផ្អែកលើ bibliometrics ដើម្បីសង្ខេប និងរៀបចំរចនាសម្ព័ន្ធអក្សរសិល្ប៍សិក្សាដែលមានស្រាប់ និងបង្ហាញពីនិន្នាការស្រាវជ្រាវបច្ចុប្បន្ន និងចំណុចក្តៅ។ យើង អនុវត្តបច្ចេកទេស bibliometric និងវិភាគអក្សរសិល្ប៍ជុំវិញយន្តហោះគ្មានមនុស្សបើកកសិកម្មដើម្បីសង្ខេបនិង វាយតម្លៃការស្រាវជ្រាវពីមុន។ ការវិភាគរបស់យើងបង្ហាញថា ការយល់ឃើញពីចម្ងាយ កសិកម្មច្បាស់លាស់ ការរៀនស៊ីជម្រៅ ការរៀនដោយម៉ាស៊ីន និងអ៊ីនធឺណិតនៃរឿង គឺជាប្រធានបទសំខាន់ដែលទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើកកសិកម្ម។ សេចក្តីយោងរួម ការវិភាគបង្ហាញពីក្រុមស្រាវជ្រាវទូលំទូលាយចំនួនប្រាំមួយនៅក្នុងអក្សរសិល្ប៍។ ការសិក្សានេះគឺជាការប៉ុនប៉ងដំបូងមួយដើម្បីសង្ខេបការស្រាវជ្រាវលើយន្តហោះគ្មានមនុស្សបើកក្នុងវិស័យកសិកម្ម និងណែនាំទិសដៅស្រាវជ្រាវនាពេលអនាគត។ |
សេចក្តីផ្តើម
កសិកម្មតំណាងឱ្យប្រភពអាហារចម្បងរបស់ពិភពលោក (Friha et al., 2021) ហើយវាបាននិងកំពុងប្រឈមមុខនឹងបញ្ហាប្រឈមយ៉ាងធ្ងន់ធ្ងរដោយសារតែ
ការកើនឡើងនៃតម្រូវការផលិតផលម្ហូបអាហារ សុវត្ថិភាពចំណីអាហារ និងកង្វល់សន្តិសុខ ព្រមទាំងការអំពាវនាវឱ្យមានការការពារបរិស្ថាន ការរក្សាទឹក និង
និរន្តរភាព (Inoue, 2020)។ ការអភិវឌ្ឍន៍នេះត្រូវបានព្យាករណ៍ថានឹងបន្តចាប់តាំងពីចំនួនប្រជាជនពិភពលោកត្រូវបានគេប៉ាន់ស្មានថានឹងកើនឡើងដល់ 9.7 ពាន់លាននាក់នៅឆ្នាំ 2050
(2019)។ ដោយសារកសិកម្មបង្កើតបានជាឧទាហរណ៍ដ៏លេចធ្លោបំផុតនៃការប្រើប្រាស់ទឹកជាសកល គេរំពឹងថាតម្រូវការអាហារ និងទឹក។
ការប្រើប្រាស់នឹងកើនឡើងយ៉ាងខ្លាំងនាពេលអនាគតដ៏ខ្លីខាងមុខ។ លើសពីនេះ ការប្រើប្រាស់ជី និងថ្នាំសម្លាប់សត្វល្អិតកើនឡើង
គួបផ្សំនឹងការបង្កើនសកម្មភាពកសិកម្ម អាចនាំឱ្យមានបញ្ហាប្រឈមបរិស្ថាននាពេលអនាគត។ ដូចគ្នាដែរ ដីបង្កបង្កើនផលមានកម្រិត
ចំនួនកសិករកំពុងថយចុះនៅទូទាំងពិភពលោក។ បញ្ហាប្រឈមទាំងនេះបញ្ជាក់អំពីតម្រូវការសម្រាប់ដំណោះស្រាយកសិកម្មប្រកបដោយភាពច្នៃប្រឌិត និងនិរន្តរភាព (អេលីយ៉ា
et al ។ , 2018; Friha et al ។ , 2021; Inoue, 2020; Tzounis et al ។ , 2017) ។
ការបញ្ចូលបច្ចេកវិទ្យាប្រលោមលោកត្រូវបានកំណត់ថាជាដំណោះស្រាយដ៏ជោគជ័យមួយដើម្បីដោះស្រាយបញ្ហាប្រឈមទាំងនេះ។ កសិកម្មឆ្លាតវៃ (Brewster et al.,
ឆ្នាំ ២០១៧; Tang et al., 2017) និងកសិកម្មច្បាស់លាស់ (Feng et al., 2021; Khanna & Kaur, 2019) បានលេចចេញជាលទ្ធផលនៃការជជែកដេញដោលបែបនេះ។ នេះ។
អតីតគឺជាសញ្ញាណទូទៅសម្រាប់ការទទួលយកបច្ចេកវិទ្យាទំនាក់ទំនងព័ត៌មាន (ICT) និងការច្នៃប្រឌិតថ្មីៗផ្សេងទៀតនៅក្នុងសកម្មភាពកសិកម្មដើម្បីបង្កើនប្រសិទ្ធភាព និងប្រសិទ្ធភាព (Haque et al., 2021)។ ក្រោយមកទៀតផ្តោតលើការគ្រប់គ្រងតំបន់ជាក់លាក់ដែលដីត្រូវបានបែងចែកទៅជា
ផ្នែកដូចគ្នា ហើយផ្នែកនីមួយៗទទួលបានបរិមាណជាក់លាក់នៃធាតុចូលកសិកម្មសម្រាប់ការបង្កើនទិន្នផលដំណាំដោយមធ្យោបាយនៃបច្ចេកវិទ្យាថ្មីៗ (Feng et al., 2019; Khanna & Kaur, 2019)។ បច្ចេកវិទ្យាលេចធ្លោដែលបានទាក់ទាញចំណាប់អារម្មណ៍របស់អ្នកប្រាជ្ញក្នុងវិស័យនេះរួមមាន Wireless Sensor Networks (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), Internet of Things (IoT) (Gill et al., 2017; He et al., 2021; Liu et al., 2019),
បច្ចេកទេសបញ្ញាសិប្បនិម្មិត (AI) រួមទាំងការរៀនម៉ាស៊ីន និងការរៀនស៊ីជម្រៅ (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019), បច្ចេកវិទ្យាកុំព្យូទ័រ (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), ទិន្នន័យធំ (Gill et al., 2017; Tantalaki
et al., 2019) និង blockchain (PW Khan et al., 2020; Pincheira et al., 2021)។
បន្ថែមពីលើបច្ចេកវិទ្យាដែលបានរៀបរាប់ខាងលើ ការចាប់សញ្ញាពីចម្ងាយត្រូវបានចាត់ទុកថាជាឧបករណ៍បច្ចេកវិទ្យាដែលមានសក្តានុពលខ្ពស់ក្នុងការកែលម្អ
កសិកម្មឆ្លាតវៃ និងច្បាស់លាស់។ ផ្កាយរណប យន្តហោះដែលបង្កើតដោយមនុស្ស និងយន្តហោះគ្មានមនុស្សបើក គឺជាបច្ចេកវិទ្យាចាប់សញ្ញាពីចម្ងាយដ៏ពេញនិយម (Tsouros et al., 2019)។
យន្តហោះគ្មានមនុស្សបើក ដែលត្រូវបានគេស្គាល់ជាទូទៅថាជា Unmanned Aerial Vehicles (UAVs), Unmanned Aircraft Systems (UAS) និងយន្តហោះដែលហោះពីចម្ងាយ គឺជារបស់
សារៈសំខាន់ដ៏អស្ចារ្យ ដោយសារតែពួកគេមានអត្ថប្រយោជន៍ច្រើន ក្នុងការប្រៀបធៀបជាមួយនឹងបច្ចេកវិជ្ជាចាប់សញ្ញាពីចម្ងាយផ្សេងទៀត។ ជាឧទាហរណ៍ ដ្រូនអាចដឹកជញ្ជូនបាន។
រូបភាពដែលមានគុណភាពខ្ពស់ និងគុណភាពបង្ហាញខ្ពស់នៅថ្ងៃដែលមានពពក (Manfreda et al., 2018)។ ដូចគ្នានេះផងដែរ, ភាពអាចរកបាននិងល្បឿនផ្ទេររបស់ពួកគេបង្កើតផ្សេងទៀត។
អត្ថប្រយោជន៍ (Radoglou-Grammatikis et al., 2020)។ បើប្រៀបធៀបជាមួយយន្តហោះ យន្តហោះគ្មានមនុស្សបើកមានតម្លៃថ្លៃខ្ពស់ និងងាយស្រួលក្នុងការរៀបចំ និងថែទាំ (Tsouros et al., 2019)។ ទោះបីជាត្រូវបានប្រើប្រាស់ជាចម្បងសម្រាប់គោលបំណងយោធាក៏ដោយ យន្តហោះគ្មានមនុស្សបើកអាចផ្តល់អត្ថប្រយោជន៍ដល់កម្មវិធីស៊ីវិលជាច្រើនឧទាហរណ៍ក្នុងការគ្រប់គ្រងខ្សែសង្វាក់ផ្គត់ផ្គង់ (A. Rejeb, Rejeb, et al., 2021a) សម្រាប់គោលបំណងមនុស្សធម៌ (A. Rejeb, Rejeb, et al., 2021c) កសិកម្មឆ្លាតវៃ ការស្ទង់មតិ និងការធ្វើផែនទី ឯកសារបេតិកភណ្ឌវប្បធម៌ ការគ្រប់គ្រងគ្រោះមហន្តរាយ និងការអភិរក្សព្រៃឈើ និងសត្វព្រៃ (Panday, Pratihast, et al., 2020)។ នៅក្នុងវិស័យកសិកម្ម តំបន់អនុវត្តជាច្រើននៃយន្តហោះគ្មានមនុស្សបើកមាន ដោយសារពួកវាអាចត្រូវបានរួមបញ្ចូលជាមួយបច្ចេកវិទ្យាថ្មី សមត្ថភាពកុំព្យូទ័រ និងឧបករណ៍ចាប់សញ្ញានៅលើយន្តហោះ ដើម្បីគាំទ្រការគ្រប់គ្រងដំណាំ (ឧទាហរណ៍ ការធ្វើផែនទី ការត្រួតពិនិត្យ ប្រព័ន្ធធារាសាស្រ្ត ការធ្វើរោគវិនិច្ឆ័យរុក្ខជាតិ) (H. Huang et al., 2021) ការកាត់បន្ថយគ្រោះមហន្តរាយ ប្រព័ន្ធព្រមានជាមុន ការអភិរក្សសត្វព្រៃ និងព្រៃឈើ ដើម្បីដាក់ឈ្មោះមួយចំនួន (Negash et al., 2019)។ ស្រដៀងគ្នានេះដែរ យន្តហោះគ្មានមនុស្សបើកអាចប្រើប្រាស់បានក្នុងសកម្មភាពកសិកម្មជាច្រើន រួមទាំងការត្រួតពិនិត្យដំណាំ និងការលូតលាស់ ការប៉ាន់ប្រមាណទិន្នផល ការវាយតម្លៃភាពតានតឹងក្នុងទឹក និងស្មៅ សត្វល្អិត និងការរកឃើញជំងឺ (Inoue, 2020; Panday, Pratihast, et al., 2020)។ យន្តហោះគ្មានមនុស្សបើកមិនត្រឹមតែអាចប្រើប្រាស់សម្រាប់គោលបំណងត្រួតពិនិត្យ ការប៉ាន់ប្រមាណ និងការរកឃើញដោយផ្អែកលើទិន្នន័យញ្ញាណរបស់ពួកគេប៉ុណ្ណោះទេ ប៉ុន្តែថែមទាំងសម្រាប់ប្រព័ន្ធធារាសាស្រ្តច្បាស់លាស់ និងភាពជាក់លាក់នៃស្មៅ សត្វល្អិត និងការគ្រប់គ្រងជំងឺ។ ម្យ៉ាងវិញទៀត យន្តហោះគ្មានមនុស្សបើក អាចបាញ់ទឹក និងថ្នាំសម្លាប់សត្វល្អិត ក្នុងបរិមាណច្បាស់លាស់ ដោយផ្អែកលើទិន្នន័យបរិស្ថាន។ អត្ថប្រយោជន៍នៃយន្តហោះគ្មានមនុស្សបើកក្នុងវិស័យកសិកម្មត្រូវបានសង្ខេបនៅក្នុងតារាងទី 1 ។
អត្ថប្រយោជន៍ចម្បងរបស់យន្តហោះគ្មានមនុស្សបើកក្នុងវិស័យកសិកម្ម។
| អត្ថប្រយោជន៍ | ឯកសារយោង |
| ពង្រឹងផ្នែកខាងសាច់ឈាម និងលំហ ដំណោះស្រាយការយល់ឃើញ | (Gago et al ។ , 2015; Niu et al ។ , 2020; Srivastava et al ។ , 2020) |
| សម្រួលដល់កសិកម្មច្បាស់លាស់ | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaitijiang et al ។ , 2017) |
| ការចាត់ថ្នាក់ និងការរុករករបស់ ដំណាំ | (Inoue, 2020; Kalischuk et al ។ , 2019; Lopez-' Granados et al ។ , 2016; Maimaitijiang et al ។ , 2017; Melville et al ។ , 2019; Moharana & Dutta, 2016) |
| ការប្រើប្រាស់ជី | (L. Deng et al., 2018; Guan et al., 2019) |
| ការតាមដានគ្រោះរាំងស្ងួត | (Fawcett et al ។ , 2020; Panday, Pratihast, et al ។ , ឆ្នាំ ២០២០; ស៊ូ et al., 2020) |
| ការប៉ាន់ស្មានជីវម៉ាស | (Bendig et al ។ , 2014) |
| ការប៉ាន់ស្មានទិន្នផល | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao et al ។ , 2020) |
| ការកាត់បន្ថយគ្រោះមហន្តរាយ | (Negash et al ។ , 2019) |
| ការអភិរក្សសត្វព្រៃ និង ព្រៃឈើ | (Negash et al ។ , 2019; Panday, Pratihast, et al ។ , 2020) |
| ការវាយតម្លៃភាពតានតឹងទឹក។ | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. Zhang et al ។ , 2019) |
| សត្វល្អិត ស្មៅ និងជំងឺ ការរកឃើញ | (Gaˇsparovi'c et al., 2020; Inoue, 2020; J. Su, Liu, et al ។ , 2018; X. Zhang et al., 2019) |
ម្យ៉ាងវិញទៀត យន្តហោះគ្មានមនុស្សបើក ក៏ប្រឈមនឹងការកំណត់ផងដែរ។ ការចូលរួមពីអ្នកបើកបរ ថាមពលម៉ាស៊ីន ស្ថេរភាព និងភាពជឿជាក់ គុណភាពរបស់ឧបករណ៍ចាប់សញ្ញាដោយសារបន្ទុក
ការកំណត់ទម្ងន់ ការចំណាយលើការអនុវត្ត និងបទប្បញ្ញត្តិអាកាសចរណ៍ ស្ថិតក្នុងចំណោមពួកគេ (C. Zhang & Kovacs, 2012)។ យើងប្រៀបធៀបចំណុចខ្វះខាត
នៃបច្ចេកវិទ្យាចាប់សញ្ញាពីចម្ងាយចល័តទាំងបីនៅក្នុងតារាងទី 2 ។ បច្ចេកវិទ្យាចាប់សញ្ញាពីចម្ងាយផ្សេងទៀតដូចជាឧបករណ៍ចាប់សញ្ញាដីគឺហួសពីការផ្តោតអារម្មណ៍នៃការសិក្សានេះ។
កង្វះខាតនៃបច្ចេកវិទ្យាចាប់សញ្ញាពីចម្ងាយចល័តផ្សេងៗ។
| អារម្មណ៍ពីចម្ងាយ បច្ចេកវិទ្យា | ការខ្វះខាត | ឯកសារយោង |
| ដ្រូន (UAV) | ការចូលរួមពីអ្នកបើកយន្តហោះ; រូបភាព' គុណភាព (មធ្យម); ការចំណាយលើការអនុវត្ត (ជាមធ្យម); ស្ថេរភាព ភាពបត់បែន និង ភាពជឿជាក់; ស្តង់ដារ ថាមពលម៉ាស៊ីន; ថាមពលមានកំណត់ ប្រភព (អាយុកាលថ្ម); រយៈពេលហោះហើរមានកំណត់ ការប៉ះទង្គិច និងការវាយប្រហារតាមអ៊ីនធឺណិត; មានកំណត់ ទំងន់ផ្ទុក; សំណុំទិន្នន័យធំ និងដំណើរការទិន្នន័យមានកំណត់ សមត្ថភាព; កង្វះបទប្បញ្ញត្តិ; កង្វះជំនាញ, ការចូលខ្ពស់។ ឧបសគ្គចំពោះការចូលទៅកាន់ យន្តហោះគ្មានមនុស្សបើកកសិកម្ម; | (Bacco et al ។ , 2018; Dawaliby et al ។ , 2020; ហាឌីន & Hardin, ឆ្នាំ 2010; ហាឌីន & Jensen, 2011; Lagkas et al ។ ឆ្នាំ 2018; Laliberte et al ។ , 2007; Laliberte & Rango, 2011; Manfreda et al., 2018, 2018; Nebiker et al ។ , 2008; ភូរី et al ។ , 2017; Velusamy et al ។ ២០២២; C. Zhang & Kovacs, 2012) |
| ផ្កាយរណប | ការគ្របដណ្តប់ផ្កាយរណបតាមកាលកំណត់, ដំណោះស្រាយវិសាលគមមានកំណត់; ភាពងាយរងគ្រោះចំពោះបញ្ហាដែលមើលឃើញ (ឧ. ពពក); ភាពមិនមាន និងល្បឿនផ្ទេរទាប; ការតំរង់ទិស និងការបំភ្លឺ ផលប៉ះពាល់ទិន្នន័យលំហដែលមានតម្លៃថ្លៃ ការប្រមូល; ការផ្តល់ទិន្នន័យយឺត ពេលវេលាសម្រាប់អ្នកប្រើប្រាស់ចុងក្រោយ | (Aboutalebi et al., 2019; Cen et al ។ , 2019; Chen et al ។ ឆ្នាំ 2019; Nansen & Elliott, ឆ្នាំ ២០១៦; Panday, Pratihast, et al ។ , 2020; សៃ វីណេត et al ។ , 2019) |
| យន្តហោះ | ថ្លៃដើមខ្ពស់; ការរៀបចំស្មុគស្មាញ; ការចំណាយលើការថែទាំ; ភាពមិនអាចជឿទុកចិត្តបាន។ យន្តហោះ, ធរណីមាត្រនៃ រូបភាព; ទិន្នន័យមិនទៀងទាត់ ការទិញយក; កង្វះនៃភាពបត់បែន; គ្រោះថ្នាក់ស្លាប់; ទិន្នន័យឧបករណ៍ចាប់សញ្ញា ការប្រែប្រួលដោយសារតែការរំញ័រ; បញ្ហាការយោងតាមភូមិសាស្ត្រ | (Armstrong et al ។ , 2011; Atkinson et al ។ , 2018; Barbedo & Koenigkan, 2018; Kovalev & Voroshilova, ឆ្នាំ ២០២០; Suomalainen et al ។ ឆ្នាំ 2013; Thamm et al., 2013) |
ក្នុងនាមជាបច្ចេកវិទ្យាពហុជំនាញ និងពហុមុខងារក្នុងវិស័យកសិកម្ម យន្តហោះគ្មានមនុស្សបើកត្រូវបានស៊ើបអង្កេតតាមទស្សនៈផ្សេងៗ។ ជាឧទាហរណ៍ អ្នកប្រាជ្ញបានពិនិត្យមើលកម្មវិធីដ្រូនក្នុងវិស័យកសិកម្ម (Kulbacki et al., 2018; Mogili & Deepak, 2018) ការចូលរួមចំណែករបស់ពួកគេចំពោះវិស័យកសិកម្មច្បាស់លាស់ (Puri et al., 2017; Tsouros et al., 2019) ការបំពេញបន្ថែមរបស់ពួកគេជាមួយនឹងកម្មវិធីផ្សេងៗទៀត។ បច្ចេកវិទ្យាទំនើបៗ (Al-Thani et al., 2020; Dutta & Mitra, 2021; Nayyar et al., 2020; Saha et al., 2018) និងលទ្ធភាពនៃការជំរុញការរុករក និងការយល់ឃើញរបស់ពួកគេ (Bareth et , 2015; Suomalainen et al., 2014). ចាប់តាំងពីការស្រាវជ្រាវលើកម្មវិធីយន្តហោះគ្មានមនុស្សបើកក្នុងវិស័យកសិកម្មបានក្លាយទៅជារីករាលដាល (Khan et al., 2021)) ចាំបាច់ត្រូវសង្ខេបអក្សរសិល្ប៍ដែលមានស្រាប់ និងបង្ហាញពីរចនាសម្ព័ន្ធបញ្ញារបស់ដែន។ ជាងនេះទៅទៀត ក្នុងនាមជាវិស័យបច្ចេកវិទ្យាខ្ពស់ជាមួយនឹងការកែលម្អជាបន្តបន្ទាប់ ការត្រួតពិនិត្យរចនាសម្ព័ន្ធចាំបាច់ត្រូវធ្វើឡើង ដើម្បីសង្ខេបអក្សរសិល្ប៍ដែលនៅសេសសល់ជាប្រចាំ និងកំណត់ចន្លោះប្រហោងនៃការស្រាវជ្រាវសំខាន់ៗ។ ទៅ
កាលបរិច្ឆេទ មានការពិនិត្យតិចតួចដែលពិភាក្សាអំពីការប្រើដ្រូនក្នុងវិស័យកសិកម្ម។ ឧទាហរណ៍ Mogili and Deepak (2018) បានពិនិត្យយ៉ាងខ្លីអំពីផលប៉ះពាល់របស់ឧបករណ៍សម្រាប់ការត្រួតពិនិត្យដំណាំ និងការបាញ់ថ្នាំសម្លាប់សត្វល្អិត។ Inoue (2020) ធ្វើការពិនិត្យឡើងវិញលើការប្រើប្រាស់ផ្កាយរណប និងយន្តហោះគ្មានមនុស្សបើកក្នុងការចាប់សញ្ញាពីចម្ងាយក្នុងវិស័យកសិកម្ម។ អ្នកនិពន្ធស្វែងយល់ពីបញ្ហាប្រឈមផ្នែកបច្ចេកវិទ្យានៃការទទួលយកការធ្វើកសិកម្មឆ្លាតវៃ និងការរួមចំណែករបស់ផ្កាយរណប និងយន្តហោះគ្មានមនុស្សបើក ដោយផ្អែកលើករណីសិក្សា និងការអនុវត្តល្អបំផុត។ Tsouros et al ។ (ឆ្នាំ 2019) សង្ខេបប្រភេទផ្សេងគ្នានៃយន្តហោះគ្មានមនុស្សបើក និងកម្មវិធីចម្បងរបស់ពួកគេក្នុងវិស័យកសិកម្ម ដោយគូសបញ្ជាក់ពីការទទួលបានទិន្នន័យ និងវិធីសាស្ត្រដំណើរការផ្សេងៗ។ ថ្មីៗនេះ Aslan et al ។ (2022) បានធ្វើការពិនិត្យឡើងវិញយ៉ាងទូលំទូលាយនៃកម្មវិធី UAV នៅក្នុងសកម្មភាពកសិកម្ម និងបានគូសបញ្ជាក់អំពីភាពពាក់ព័ន្ធនៃការធ្វើមូលដ្ឋានីយកម្មក្នុងពេលដំណាលគ្នា និងការគូសផែនទីសម្រាប់ UAV នៅក្នុងផ្ទះកញ្ចក់។ Diaz-Gonzalez et al ។ (2022) បានពិនិត្យលើការសិក្សាថ្មីៗនៃផលិតកម្មដំណាំ ដោយផ្អែកលើបច្ចេកទេសរៀនម៉ាស៊ីនផ្សេងគ្នា និងពីចម្ងាយ
ប្រព័ន្ធចាប់សញ្ញា។ ការរកឃើញរបស់ពួកគេបានបង្ហាញថា UAVs មានប្រយោជន៍ក្នុងការប៉ាន់ប្រមាណសូចនាករដី និងដំណើរការប្រព័ន្ធផ្កាយរណបក្នុងលក្ខខណ្ឌនៃការដោះស្រាយលំហ ភាពបណ្តោះអាសន្ននៃព័ត៌មាន និងភាពបត់បែន។ Basiri et al ។ (2022) បានធ្វើការពិនិត្យឡើងវិញយ៉ាងពេញលេញអំពីវិធីសាស្រ្ត និងវិធីសាស្រ្តផ្សេងៗដើម្បីជម្នះបញ្ហាប្រឈមក្នុងការធ្វើផែនការផ្លូវសម្រាប់ UAVs ពហុរ៉ូទ័រនៅក្នុងបរិបទនៃកសិកម្មច្បាស់លាស់។ លើសពីនេះទៅទៀត Awais et al ។ (2022) បានសង្ខេបកម្មវិធីនៃទិន្នន័យការចាប់សញ្ញាពីចម្ងាយ UAV នៅក្នុងដំណាំដើម្បីប៉ាន់ប្រមាណស្ថានភាពទឹក និងផ្តល់នូវការសំយោគស៊ីជម្រៅនៃសមត្ថភាពអនាគតនៃការចាប់សញ្ញាពីចម្ងាយ UAV សម្រាប់កម្មវិធីស្ត្រេសសំណល់។ ទីបំផុត Aquilani et al ។ (2022) បានពិនិត្យឡើងវិញនូវបច្ចេកវិទ្យាកសិកម្មបណ្តោះអាសន្នដែលបានអនុវត្តនៅក្នុងប្រព័ន្ធបសុសត្វដែលមានមូលដ្ឋានលើវាលស្មៅ ហើយបានសន្និដ្ឋានថាការចាប់សញ្ញាពីចម្ងាយដែលបើកដោយ UAVs មានអត្ថប្រយោជន៍សម្រាប់ការវាយតម្លៃជីវម៉ាស់ និងការគ្រប់គ្រងហ្វូង។
គួរបញ្ជាក់ផងដែរថា ការខិតខំប្រើប្រាស់ UAVs ក្នុងការត្រួតពិនិត្យ តាមដាន និងប្រមូលសត្វពាហនៈ ត្រូវបានរាយការណ៍នាពេលថ្មីៗនេះ។
ទោះបីជាការវាយតម្លៃទាំងនេះផ្ដល់នូវការយល់ដឹងថ្មី និងសំខាន់ក៏ដោយ ក៏មិនមានការពិនិត្យឡើងវិញដ៏ទូលំទូលាយ និងទាន់សម័យដោយផ្អែកលើ bibliometrics អាចត្រូវបានរកឃើញនៅក្នុងអក្សរសិល្ប៍ដែលបង្ហាញពីគម្លាតចំណេះដឹងច្បាស់លាស់នោះទេ។ ជាងនេះទៅទៀត វាត្រូវបានគេបញ្ជាក់ថា នៅពេលដែលផលិតកម្មអ្នកប្រាជ្ញរីកចម្រើនក្នុងដែនវិទ្យាសាស្ត្រ វាមានសារៈសំខាន់សម្រាប់អ្នកស្រាវជ្រាវក្នុងការប្រើវិធីសាស្រ្តពិនិត្យបរិមាណ ដើម្បីស្វែងយល់អំពីរចនាសម្ព័ន្ធចំណេះដឹងនៃដែន (Rivera & Pizam, 2015)។ ស្រដៀងគ្នានេះដែរ Ferreira et al ។ (2014) បានអះអាងថា នៅពេលដែលវិស័យស្រាវជ្រាវមានភាពចាស់ទុំ និងមានភាពស្មុគ្រស្មាញ អ្នកប្រាជ្ញគួរមានគោលបំណងធ្វើឱ្យយល់ម្តងម្កាលនៃចំណេះដឹងដែលបានបង្កើត និងប្រមូលផ្តុំដើម្បីបង្ហាញពីការរួមចំណែកថ្មីៗ ចាប់យកទំនៀមទម្លាប់ និងនិន្នាការស្រាវជ្រាវ កំណត់ប្រធានបទណាដែលត្រូវសិក្សា និងស្វែងយល់ពីរចនាសម្ព័ន្ធចំណេះដឹងរបស់ វិស័យ និងទិសដៅស្រាវជ្រាវសក្តានុពល។ ខណៈពេលដែល Raparelli និង Bajocco (2019) បានធ្វើការវិភាគ bibliometric ដើម្បីពិនិត្យមើលដែនចំណេះដឹងនៃកម្មវិធីយន្តហោះគ្មានមនុស្សបើកក្នុងវិស័យកសិកម្ម និងព្រៃឈើ ការសិក្សារបស់ពួកគេគ្រាន់តែពិចារណាលើការស្រាវជ្រាវរបស់អ្នកប្រាជ្ញដែលបានបោះពុម្ពនៅចន្លោះឆ្នាំ 1995 និង 2017 ដែលមិនឆ្លុះបញ្ចាំងពីសក្ដានុពលនៃតំបន់ដែលមានចលនាលឿននេះ។ លើសពីនេះ អ្នកនិពន្ធមិនបានព្យាយាមកំណត់អត្តសញ្ញាណការរួមចំណែកដ៏មានឥទ្ធិពលបំផុតនៅក្នុងវិស័យនេះ ធ្វើចង្កោមអក្សរសិល្ប៍ និងវាយតម្លៃរចនាសម្ព័ន្ធបញ្ញាដោយប្រើការវិភាគការដកស្រង់រួមគ្នានោះទេ។ ជាលទ្ធផល វាចាំបាច់ក្នុងការសង្ខេបអក្សរសិល្ប៍ដើម្បីបង្ហាញពីការស្រាវជ្រាវបច្ចុប្បន្ន និន្នាការ និងចំណុចក្តៅ។
ដើម្បីបំពេញគម្លាតចំណេះដឹងនេះ យើងប្រើប្រាស់វិធីសាស្ត្របរិមាណ និងវិធីសាស្ត្រ Bibliometric យ៉ាងម៉ត់ចត់ ដើម្បីពិនិត្យមើលស្ថានភាពបច្ចុប្បន្ននៃការស្រាវជ្រាវនៅចំនុចប្រសព្វនៃយន្តហោះគ្មានមនុស្សបើក និងកសិកម្ម។ យើងជជែកវែកញែកថា ការសិក្សាបច្ចុប្បន្នបានរួមចំណែកជាច្រើនដល់អក្សរសិល្ប៍ដែលមានស្រាប់ ដោយពិនិត្យមើលបច្ចេកវិទ្យាដែលកំពុងរីកចម្រើនដែលត្រូវការយ៉ាងខ្លាំងក្នុងវិស័យកសិកម្ម ដោយសារវាផ្តល់នូវសក្តានុពលយ៉ាងខ្លាំងក្នុងការកែប្រែទិដ្ឋភាពជាច្រើននៅក្នុងវិស័យនេះ។ តម្រូវការសម្រាប់ការវិភាគ bibliometric នៃយន្តហោះគ្មានមនុស្សបើកកសិកម្មត្រូវបានយល់កាន់តែច្បាស់ថែមទៀតដែលផ្តល់ចំណេះដឹងដែលខ្ចាត់ខ្ចាយ និងបែកខ្ញែកលើយន្តហោះគ្មានមនុស្សបើកនៅក្នុងបរិបទកសិកម្ម។ ដូចគ្នានេះដែរ អក្សរសិល្ប៍ដែលទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើកកសិកម្ម តម្រូវឱ្យដាក់ជាក្រុមជាប្រព័ន្ធ ដោយពិចារណាលើការសិក្សាដែលមានឥទ្ធិពលបំផុត ដែលបង្កើតមូលដ្ឋានគ្រឹះនៃវិស័យស្រាវជ្រាវនេះ។ គុណសម្បត្តិនៅក្នុងការវិភាគក៏រួមបញ្ចូលផងដែរនូវការបំភ្លឺនៃប្រធានបទស្រាវជ្រាវសំខាន់ៗដែលតំណាងនៅក្នុងអក្សរសិល្ប៍។ ដោយពិចារណាលើសក្ដានុពលនៃការផ្លាស់ប្តូរនៃបច្ចេកវិទ្យា យើងសូមប្រកាសថាការវិភាគបណ្តាញស៊ីជម្រៅផ្តល់នូវការយល់ដឹងថ្មីៗដោយកំណត់ស្នាដៃដែលមានឥទ្ធិពល និងបង្ហាញប្រធានបទទាក់ទងនឹងសក្តានុពលរបស់យន្តហោះគ្មានមនុស្សបើកសម្រាប់វិស័យកសិកម្ម។
ដូច្នេះហើយ យើងខិតខំសម្រេចបាននូវគោលបំណងស្រាវជ្រាវដូចខាងក្រោម៖
- ការកំណត់អត្តសញ្ញាណការបោះពុម្ពផ្សាយដែលមានឥទ្ធិពលជាមួយនឹងការរួមចំណែកដ៏ឆ្នើមចំពោះកម្មវិធី Drone ក្នុងវិស័យកសិកម្ម។
- ការដាក់ជាចង្កោមនៃអក្សរសិល្ប៍ ការកំណត់អត្តសញ្ញាណនៃការស្រាវជ្រាវ និងការធ្វើផែនទីនៃការសិក្សា 'រចនាសម្ព័ន្ធបញ្ញា' ចម្បងដោយផ្អែកលើភាពស្រដៀងគ្នានៃន័យធៀបដោយប្រើការវិភាគការដកស្រង់រួម។
- ការយល់ដឹងអំពីការវិវត្តន៍នៃទំនាក់ទំនង និងបណ្តាញដកស្រង់តាមពេលវេលាក្នុងចំណោមការបោះពុម្ពផ្សេងៗក្នុងវិស័យនេះ និងការកំណត់ទិសដៅស្រាវជ្រាវនាពេលអនាគត និងប្រធានបទក្តៅ។
ក្រដាសដែលនៅសេសសល់ត្រូវបានរៀបចំដូចខាងក្រោម៖ ផ្នែកទី 2 រៀបរាប់អំពីវិធីសាស្រ្ត និងជំហានប្រមូលទិន្នន័យ។ ផ្នែកទី 3 ផ្តល់នូវលទ្ធផលនៃការវិភាគ; និងផ្នែកទី 4 ពិភាក្សាអំពីការរកឃើញ និងបញ្ចប់ជាមួយនឹងការរួមចំណែកស្រាវជ្រាវ ផលប៉ះពាល់ និងទិសដៅនាពេលអនាគត។
វិធីសាស្រ្ត
នៅក្នុងការសិក្សាស្រាវជ្រាវបច្ចុប្បន្ននេះ យើងធ្វើការវិភាគ bibliometric ដើម្បីស្វែងរកកម្មវិធី Drone ក្នុងវិស័យកសិកម្ម។ វិធីសាស្រ្តបរិមាណនេះបង្ហាញពីរចនាសម្ព័ន្ធបញ្ញានៃដែនចំនេះដឹង (Arora & Chakraborty, 2021) និងស្ថានភាពបច្ចុប្បន្ន ប្រធានបទក្តៅ និងទិសដៅស្រាវជ្រាវនាពេលអនាគត ដែលអាចត្រូវបានស៊ើបអង្កេតដោយការអនុវត្តវិធីសាស្ត្រនេះ (Kapoor et al., 2018; Mishra et al. , 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; MA Rejeb et al., 2020)។ ជាទូទៅ ការវិភាគគន្ថនិទ្ទេសពិនិត្យអក្សរសិល្ប៍ដែលនៅសេសសល់ ដើម្បីសង្ខេប និងបង្ហាញគំរូលាក់កំបាំងនៃការទំនាក់ទំនងជាលាយលក្ខណ៍អក្សរ និងការវិវត្តន៍នៃវិន័យដោយផ្អែកលើស្ថិតិ និងវិធីសាស្ត្រគណិតវិទ្យា ហើយវាអនុវត្តចំពោះសំណុំទិន្នន័យធំៗ (Pritchard, 1969; Small, 1999; Tahai & Rigsby , 1998)។ តាមរយៈការប្រើប្រាស់ bibliometrics យើងប្រាថ្នាចង់យល់កាន់តែច្បាស់អំពីគំរូដែលមានស្រាប់ និងការស្រាវជ្រាវ foci ដែលរួមចំណែកដល់ដែនដោយផ្អែកលើភាពស្រដៀងគ្នា (Thelwall, 2008) ។ Bibliometrics ផ្តល់នូវការយល់ដឹងថ្មីដែលគាំទ្រដោយកម្លាំងបរិមាណគោលបំណងនៃវិធីសាស្រ្ត (Casillas & Acedo, 2007)។ អ្នកប្រាជ្ញជាច្រើនពីមុនបានធ្វើការសិក្សាគន្ថនិទ្ទេសក្នុងដែនពាក់ព័ន្ធ រួមទាំងកសិកម្ម ការយល់ឃើញពីចម្ងាយ និងការផ្លាស់ប្តូរឌីជីថល (Armenta-Medina et al., 2020; Bouzembrak et al., 2019; A. Rejeb, Treiblmaier, et al., 2021; W. & Queiroz, 2021; Wang et al., 2019)។
ការវិភាគដកស្រង់
ការវិភាគដកស្រង់បង្ហាញពីការយល់ដឹងផ្សេងៗនៅក្នុងវិស័យស្រាវជ្រាវដែលបានផ្តល់ឱ្យ។ ជាដំបូងវាជួយបង្ហាញអ្នកនិពន្ធ និងការបោះពុម្ពផ្សាយដែលមានឥទ្ធិពលបំផុតដែលរួមចំណែកដល់វិស័យស្រាវជ្រាវដែលបានផ្តល់ឱ្យ និងធ្វើឱ្យមានផលប៉ះពាល់យ៉ាងសំខាន់ (Gundolf & Filser, 2013)។ ទីពីរ លំហូរចំណេះដឹង និងទំនាក់ទំនងទំនាក់ទំនងរវាងអ្នកនិពន្ធអាចត្រូវបានរកឃើញ។ ជាចុងក្រោយ តាមរយៈការតាមដានតំណភ្ជាប់រវាងស្នាដៃដែលបានដកស្រង់ និងដកស្រង់ មនុស្សម្នាក់អាចស្វែងយល់ពីការផ្លាស់ប្តូរ និងការវិវត្តនៃដែនចំណេះដឹងតាមពេលវេលា (Pournader
et al., 2020)។ លេខយោងខ្ពស់នៃការបោះពុម្ពផ្សាយឆ្លុះបញ្ចាំងពីភាពពាក់ព័ន្ធ និងការរួមចំណែកយ៉ាងសំខាន់របស់វាចំពោះដែនស្រាវជ្រាវ (Baldi, 1998; Gunolf & Filser, 2013; Marinko, 1998)។ ការវិភាគដកស្រង់នៃការបោះពុម្ពផ្សាយក៏ជួយកំណត់អត្តសញ្ញាណការងារដែលពាក់ព័ន្ធ និងតាមដានប្រជាប្រិយភាព និងវឌ្ឍនភាពរបស់ពួកគេតាមពេលវេលា។
ការវិភាគការដកស្រង់ឯកសារ
ការវិភាគសំណេររួមគឺជាវិធីសាស្រ្តដ៏មានតម្លៃក្នុងការស្វែងរកទំនាក់ទំនងរវាងការបោះពុម្ពផ្សាយ និងពណ៌នាអំពីរចនាសម្ព័ន្ធបញ្ញានៃវិស័យមួយ (Nerur et al., 2008)។ ម៉្យាងទៀត តាមរយៈការកំណត់អត្តសញ្ញាណការបោះពុម្ពដែលបានលើកឡើងច្រើនបំផុត និងទំនាក់ទំនងរបស់ពួកគេ វិធីសាស្ត្រដាក់ក្រុមការបោះពុម្ពទៅជាក្រុមស្រាវជ្រាវដាច់ដោយឡែក ដែលក្នុងនោះការបោះពុម្ពនៅក្នុងចង្កោមចែករំលែកគំនិតស្រដៀងគ្នានេះជាប្រចាំ (McCain, 1990; Small, 1973)។ វាមានសារៈសំខាន់ណាស់ក្នុងការនិយាយថាភាពស្រដៀងគ្នាមិនមានន័យថាការរកឃើញនៃការបោះពុម្ពផ្សាយនោះទេ។
ស្អិតរមួតនិងយល់ព្រមជាមួយគ្នា; ការបោះពុម្ពផ្សាយជាកម្មសិទ្ធិរបស់ក្រុមតែមួយ ដោយសារប្រធានបទស្រដៀងគ្នា ប៉ុន្តែពួកគេអាចមានទស្សនៈផ្ទុយគ្នា។
ការប្រមូលនិងវិភាគទិន្នន័យ
អនុវត្តតាមវិធីសាស្រ្តដែលស្នើឡើងដោយ White and Griffith (1981) យើងបានធ្វើការស្វែងរកយ៉ាងទូលំទូលាយនៃអត្ថបទទិនានុប្បវត្តិ ដើម្បីគ្របដណ្តប់លើដែនស្រាវជ្រាវទាំងមូលនៃកម្មវិធី Drone ក្នុងវិស័យកសិកម្ម ដោយបន្តអនុវត្តជំហានប្រាំដូចខាងក្រោម៖
- ជំហានដំបូងគឺការប្រមូលទិន្នន័យ។ Scopus ត្រូវបានជ្រើសរើសជាមូលដ្ឋានទិន្នន័យដ៏ទូលំទូលាយ និងគួរឱ្យទុកចិត្តបំផុតមួយ ជាមួយនឹងលទ្ធផលស្តង់ដារ។ ទិន្នន័យមេតានៃការបោះពុម្ពផ្សាយទាក់ទងនឹងកម្មវិធីដ្រូនទាំងអស់ក្នុងវិស័យកសិកម្មត្រូវបានទាញយកមកវិញ។ បន្ទាប់មក យើងវិភាគអត្ថបទដែលបានជ្រើសរើស ដោយយកអត្ថបទក្រៅប្រធានបទចេញពីការវិភាគ។
- យើងបានវិភាគអក្សរសិល្ប៍ និងកំណត់ពាក្យគន្លឹះសំខាន់ៗដែលប្រើក្នុងផ្នែកស្រាវជ្រាវ។
- ដោយប្រើការវិភាគការដកស្រង់ យើងបានស្វែងយល់ពីទំនាក់ទំនងរវាងអ្នកនិពន្ធ និងឯកសារ ដើម្បីបង្ហាញពីគំរូនៃការដកស្រង់មូលដ្ឋាន។ យើងក៏បានកំណត់អត្តសញ្ញាណអ្នកនិពន្ធ និងការបោះពុម្ពផ្សាយដែលមានឥទ្ធិពលបំផុតជាមួយនឹងការរួមចំណែកយ៉ាងសំខាន់ក្នុងវិស័យកសិកម្មដ្រូន។
- យើងបានធ្វើការវិភាគការដកស្រង់រួមគ្នាដើម្បីដាក់ការបោះពុម្ពស្រដៀងគ្នាជាក្រុម។
- ជាចុងក្រោយ យើងបានវិភាគទំនាក់ទំនង និងទំនាក់ទំនងរវាងប្រទេស ស្ថាប័ន និងទិនានុប្បវត្តិ ដើម្បីពណ៌នាអំពីបណ្តាញកិច្ចសហប្រតិបត្តិការ។
ការកំណត់អត្តសញ្ញាណពាក្យស្វែងរកសមស្រប
យើងបានអនុវត្តខ្សែអក្សរស្វែងរកខាងក្រោមសម្រាប់ការប្រមូលផ្តុំទិន្នន័យ៖ (យន្តហោះគ្មានមនុស្សបើក* ឬ "យានអវកាសគ្មានមនុស្សបើក" ឬ uav* ឬ "ប្រព័ន្ធយន្តហោះគ្មានមនុស្សបើក“ ឬដែល OR "យន្តហោះដែលសាកល្បងពីចម្ងាយ”) និង (កសិកម្ម ឬ កសិកម្ម ឬ កសិកម្ម ឬ កសិករ) ការស្វែងរកត្រូវបានធ្វើឡើងក្នុងខែកញ្ញា ឆ្នាំ 2021។ យន្តហោះគ្មានមនុស្សបើកមានការរចនាជាច្រើន រួមទាំង UAV, UAS, និងយន្តហោះដែលសាកល្បងពីចម្ងាយ (Sah et al., 2021)។ ពាក្យស្វែងរកជាក់លាក់ទាក់ទងនឹងកសិកម្មត្រូវបានកំណត់ដោយផ្អែកលើការសិក្សារបស់ Abdollahi et al ។ (២០២១)។ សម្រាប់ជាប្រយោជន៍នៃភាពច្បាស់លាស់ និងតម្លាភាព សំណួរពិតប្រាកដដែលយើងបានប្រើគឺត្រូវបានផ្តល់ឱ្យនៅក្នុងឧបសម្ព័ន្ធទី 2021។ បន្ទាប់ពីដំណើរការសម្អាតទិន្នន័យ យើងបានបង្កើតឯកសារអត្ថបទមួយដែលត្រូវបានផ្ទុកជាបន្តបន្ទាប់ទៅក្នុង BibExcel ដែលជាឧបករណ៍ទូទៅសម្រាប់ការវិភាគការដកស្រង់ និងការដកស្រង់។ ឧបករណ៍នេះក៏ផ្តល់នូវអន្តរកម្មដ៏សាមញ្ញជាមួយកម្មវិធីផ្សេងទៀត និងផ្តល់នូវកម្រិតសេរីភាពយ៉ាងសំខាន់ក្នុងការគ្រប់គ្រង និងវិភាគទិន្នន័យ។ VOSviewer កំណែ 1 ត្រូវបានប្រើដើម្បីស្រមៃមើលការរកឃើញ និងបង្កើតបណ្តាញ bibliometric (Eck & Waltman, 1.6.16) ។ VOSviewer ផ្តល់នូវការមើលឃើញវិចារណញាណជាច្រើន ជាពិសេសសម្រាប់ការវិភាគផែនទី bibliometric (Geng et al., 2009)។ លើសពីនេះ វាជួយក្នុងការផ្តល់នូវលទ្ធផលដែលមើលឃើញធម្មតា ដែលជួយក្នុងការយល់ដឹងកាន់តែច្បាស់អំពីលទ្ធផល (Abdollahi et al., 2020)។ ដោយអនុវត្តខ្សែអក្សរស្វែងរកដូចបានរៀបរាប់ខាងលើ យើងបានប្រមូល និងរក្សាទុកការបោះពុម្ពដែលពាក់ព័ន្ធទាំងអស់។ លទ្ធផលស្រាវជ្រាវដំបូង បានផ្តល់ឯកសារសរុបចំនួន ៥.០៨៥។ ដើម្បីធានាបាននូវគុណភាពនៃគំរូដែលបានជ្រើសរើស មានតែអត្ថបទទិនានុប្បវត្តិដែលបានពិនិត្យដោយមិត្តភ័ក្តិប៉ុណ្ណោះដែលត្រូវបានពិចារណានៅក្នុងការស្រាវជ្រាវ ដែលបណ្តាលឱ្យមានការដកចេញនូវប្រភេទឯកសារផ្សេងទៀត ដូចជាសៀវភៅ ជំពូក ដំណើរការសន្និសីទ និងកំណត់ចំណាំរបស់វិចារណកថា។ ក្នុងអំឡុងពេលដំណើរការពិនិត្យ ភាពមិនពាក់ព័ន្ធ (ពោលគឺហួសពីវិសាលភាពនៃការងារនេះ) ឯកសារដែលមិនបានការ (ឧ. ស្ទួនដែលមានប្រភពមកពីការធ្វើលិបិក្រមពីរដង) និងការបោះពុម្ពផ្សាយដែលមិននិយាយភាសាអង់គ្លេសត្រូវបានច្រោះចេញ។ ដំណើរការនេះបណ្តាលឱ្យមានការបញ្ចូលឯកសារចំនួន 2021 នៅក្នុងការវិភាគចុងក្រោយ។
ការរកឃើញនិងការពិភាក្សា
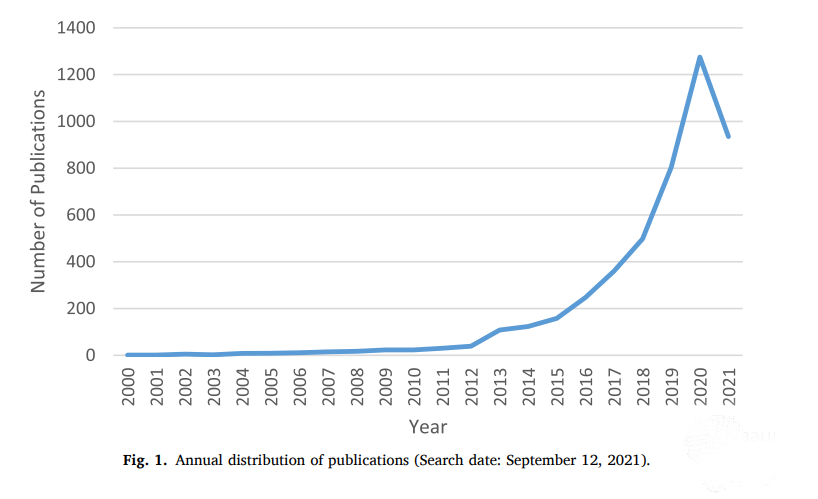
ដើម្បីចាប់ផ្តើម យើងបានវិភាគលើការវិវឌ្ឍន៍នៃលទ្ធផលបោះផ្សាយនៅក្នុងអក្សរសិល្ប៍បច្ចុប្បន្នលើយន្តហោះគ្មានមនុស្សបើកកសិកម្ម។ ការចែកចាយបណ្ដោះអាសន្ននៃការស្រាវជ្រាវអ្នកប្រាជ្ញត្រូវបានបង្ហាញក្នុងរូបទី 1។ យើងឃើញមានការកើនឡើងយ៉ាងឆាប់រហ័សនៃការបោះពុម្ពផ្សាយចាប់ពីឆ្នាំ 2011 (ការបោះពុម្ពចំនួន 30) តទៅ។ ដូច្នេះហើយ យើងបានសម្រេចចិត្តបែងចែករយៈពេលវិភាគជាពីរដំណាក់កាលផ្សេងគ្នា។ យើងសំដៅទៅលើរយៈពេលរវាងឆ្នាំ 1990 និងឆ្នាំ 2010 ជាដំណាក់កាលបង្កើត ដែលមានក្រដាសប្រហែលប្រាំពីរបោះពុម្ពជារៀងរាល់ឆ្នាំ។ រយៈពេលក្រោយឆ្នាំ 2010 ត្រូវបានគេហៅថាជាដំណាក់កាលរីកចម្រើនចាប់តាំងពីការស្រាវជ្រាវលើកម្មវិធីយន្តហោះគ្មានមនុស្សបើកក្នុងវិស័យកសិកម្មបានឃើញការកើនឡើងអិចស្ប៉ូណង់ស្យែលក្នុងអំឡុងពេលនេះ។ បន្ទាប់ពីឆ្នាំ 2010 ចំនួនការបោះពុម្ពកើនឡើងបញ្ជាក់ពីការចាប់អារម្មណ៍កាន់តែខ្លាំងឡើងក្នុងចំណោមអ្នកស្រាវជ្រាវ ដែលឆ្លុះបញ្ចាំងផងដែរថា យន្តហោះគ្មានមនុស្សបើកត្រូវបានអនុវត្តចំពោះការចាប់សញ្ញាពីចម្ងាយ និងប្រើប្រាស់ក្នុងវិស័យកសិកម្មច្បាស់លាស់ (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020 ) ជាពិសេស ចំនួននៃការបោះពុម្ពផ្សាយបានកើនឡើងពី 108 ក្នុងឆ្នាំ 2013 ដល់ 498 ក្នុងឆ្នាំ 2018 និងបានឡើងដល់កម្រិត 1,275 ក្នុងឆ្នាំ 2020។ អត្ថបទសរុបចំនួន 935 ត្រូវបានបោះពុម្ពនៅចន្លោះខែមករា និងពាក់កណ្តាលខែកញ្ញា ឆ្នាំ 2021។ ជាបន្តបន្ទាប់ យើងជ្រើសរើសផ្តោតលើការវិភាគរបស់យើងបន្ថែមទៀតលើដំណាក់កាលរីកចម្រើន។ ចាប់តាំងពីអំឡុងពេលនេះឆ្លុះបញ្ចាំងពី subtleties ថ្មីបំផុត និងសំខាន់នៃយន្តហោះគ្មានមនុស្សបើកកសិកម្ម។
ការវិភាគពាក្យគន្លឹះ
ពាក្យគន្លឹះដែលអ្នកនិពន្ធជ្រើសរើសសម្រាប់ការបោះពុម្ពផ្សាយមានផលប៉ះពាល់យ៉ាងសំខាន់ទៅលើរបៀបដែលក្រដាសត្រូវបានតំណាង និងរបៀបដែលវាត្រូវបានទាក់ទងនៅក្នុងសហគមន៍វិទ្យាសាស្ត្រ។ ពួកគេកំណត់មុខវិជ្ជាសំខាន់ៗនៃការស្រាវជ្រាវ និងកំណត់សក្តានុពលរបស់វាក្នុងការរីកចំរើន ឬបរាជ័យ (Day & Gastel, 1998.; Kim et al., 2016; Uddin et al., 2015)។ ការវិភាគពាក្យគន្លឹះ ដែលជាឧបករណ៍ដើម្បីបង្ហាញពីនិន្នាការស្រាវជ្រាវទូលំទូលាយ និងទិសដៅ សំដៅលើការចងក្រងពាក្យគន្លឹះនៃការបោះពុម្ពផ្សាយដែលពាក់ព័ន្ធទាំងអស់នៅក្នុងដែន (Dixit & Jakhar, 2021)។ នៅក្នុងការសិក្សាបច្ចុប្បន្ន យើងបានបែងចែកពាក្យគន្លឹះសរុបជាពីរឈុត (ពោលគឺរហូតដល់ឆ្នាំ 2010 និង 2011-2021) ដើម្បីស្វែងយល់អំពីប្រធានបទដែលពេញនិយមបំផុត។ តាមរយៈការធ្វើដូចនេះ យើងអាចតាមដានពាក្យគន្លឹះសំខាន់ៗក្នុងសំណុំទាំងពីរ ហើយធានាថាយើងចាប់យកទិន្នន័យចាំបាច់ទាំងអស់។ សម្រាប់ឈុតនីមួយៗ ពាក្យគន្លឹះកំពូលទាំងដប់ត្រូវបានបង្ហាញនៅក្នុងតារាងទី 3។ យើងបានលុបបំបាត់ភាពមិនស៊ីសង្វាក់គ្នាដោយការរួមបញ្ចូលគ្នានូវពាក្យគន្លឹះដែលដូចគ្នាបេះបិទ ដូចជា "យន្តហោះគ្មានមនុស្សបើក" និង "យន្តហោះគ្មានមនុស្សបើក" ឬ "អ៊ីនធឺណិតនៃអ្វីៗ" និង "IoT" ។
តារាងទី 3 បង្ហាញថា "យានអវកាសគ្មានមនុស្សបើក" គឺជាពាក្យគន្លឹះដែលប្រើញឹកញាប់ជាងបើប្រៀបធៀបទៅនឹង "យន្តហោះគ្មានមនុស្សបើក" និង "ប្រព័ន្ធអាកាសគ្មានមនុស្សបើក" ក្នុងរយៈពេលទាំងពីរ។ ដូចគ្នានេះផងដែរ "ការដឹងពីចម្ងាយ" "កសិកម្មច្បាស់លាស់" និង "កសិកម្ម" ត្រូវបានចាត់ថ្នាក់ខ្ពស់ក្នុងរយៈពេលទាំងពីរ។ ក្នុងរយៈពេលដំបូង "កសិកម្មភាពជាក់លាក់" ជាប់ចំណាត់ថ្នាក់ទី XNUMX ហើយវាជាប់ចំណាត់ថ្នាក់ទី XNUMX ក្នុងរយៈពេលទីពីរ ដែលបង្ហាញពីរបៀបដែលយន្តហោះគ្មានមនុស្សបើកកាន់តែមានសារៈសំខាន់ក្នុងការសម្រេចបាននូវវិស័យកសិកម្មច្បាស់លាស់ ខណៈដែលពួកគេអាចធ្វើការតាមដាន។
ការរកឃើញ និងការប៉ាន់ប្រមាណអនុវត្តបានលឿន ថោកជាង និងងាយស្រួលអនុវត្តក្នុងការប្រៀបធៀបជាមួយប្រព័ន្ធចាប់សញ្ញាពីចម្ងាយ និងប្រព័ន្ធមូលដ្ឋានផ្សេងទៀត។ ដូចគ្នានេះផងដែរ ពួកគេអាចបាញ់បរិមាណជាក់លាក់នៃការបញ្ចូល (ឧ. ទឹក ឬថ្នាំសម្លាប់សត្វល្អិត) នៅពេលចាំបាច់ (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020)។
បញ្ជីពាក្យគន្លឹះដែលប្រើញឹកញាប់បំផុត។
ហ | 1990-2010 | លេខនៃ ការកើតឡើង | 2011-2021 | លេខនៃ ការកើតឡើង |
| 1 | យន្តហោះគ្មានមនុស្សបើក រថយន្ត | 28 | គ្មានមនុស្សបើក យានយន្តពីលើអាកាស | 1628 |
| 2 | ការដឹងពីចម្ងាយ | 7 | ភាពជាក់លាក់ វិស័យកសិកម្ម | 489 |
| 3 | វិស័យកសិកម្ម | 4 | ការដឹងពីចម្ងាយ | 399 |
| 4 | ខ្យល់ | 4 | យន្តហោះគ្មានមនុស្សបើក | 374 |
| 5 | ភាពជាក់លាក់ វិស័យកសិកម្ម | 4 | គ្មានមនុស្សបើក ប្រព័ន្ធអាកាស | 271 |
| 6 | យន្តហោះគ្មានមនុស្សបើក | 4 | វិស័យកសិកម្ម | 177 |
| 7 | hyperspectral អង្គញាណ | 3 | ការរៀនសូត្រជ្រៅ | 151 |
| 8 | សរសៃប្រសាទសិប្បនិម្មិត បណ្តាញ | 2 | ម៉ាស៊ីន ការរៀនសូត្រ | 149 |
| 9 | ការហោះហើរស្វ័យភាព | 2 | បន្លែ សន្ទស្សន៍ | 142 |
| 10 | កាហ្វេ | 2 | អ៊ិនធឺណិតរបស់ រឿង | 124 |
លក្ខណៈពិសេសគួរឱ្យចាប់អារម្មណ៍មួយទៀតគឺវត្តមាននៃបច្ចេកវិទ្យាបំពេញបន្ថែម។ នៅក្នុងដំណាក់កាលដំបូង "ឧបករណ៍ចាប់សញ្ញាបង្ហាញខ្ពស់" និង "បណ្តាញសរសៃប្រសាទសិប្បនិម្មិត" (ANN) គឺជាពាក្យគន្លឹះកំពូលទាំងដប់។ រូបភាព Hyperspectral បានធ្វើបដិវត្តរូបភាពបែបប្រពៃណីដោយការប្រមូលរូបភាពជាច្រើននៅចម្ងាយរលកផ្សេងៗ។ ក្នុងការធ្វើដូច្នេះ ឧបករណ៍ចាប់សញ្ញាអាចប្រមូលព័ត៌មានទំហំ និងវិសាលគមបានល្អប្រសើរក្នុងពេលដំណាលគ្នា បើប្រៀបធៀបទៅនឹងរូបភាពពហុspectral, spectroscopy និងរូបភាព RGB (Adao ˜ et al.,
២០១៧)។ ការកើតឡើងនៃ "ANN" នៅក្នុងដំណាក់កាលទី 2017 និង "ការរៀនជ្រៅ" (DL) និង "ការរៀនម៉ាស៊ីន" (ML) នៅក្នុងដំណាក់កាលទីពីរមានន័យថាការងារដែលបានបោះពុម្ពភាគច្រើនផ្តោតលើការពិនិត្យសក្តានុពលនៃបច្ចេកទេស AI សម្រាប់យន្តហោះគ្មានមនុស្សបើក។ កសិកម្មដែលមានមូលដ្ឋាន។ ទោះបីជាយន្តហោះគ្មានមនុស្សបើកមានសមត្ថភាពហោះហើរដោយស្វ័យភាពក៏ដោយ ក៏ពួកគេនៅតែទាមទារឱ្យមានការចូលរួមពីអ្នកបើកយន្តហោះ ដែលបង្កប់ន័យកម្រិតនៃភាពវៃឆ្លាតឧបករណ៍ទាប។ ទោះជាយ៉ាងណាក៏ដោយ បញ្ហានេះអាចដោះស្រាយបានដោយសារតែភាពជឿនលឿននៃបច្ចេកទេស AI ដែលអាចផ្តល់នូវការយល់ដឹងអំពីស្ថានភាពកាន់តែប្រសើរ និងការគាំទ្រការសម្រេចចិត្តដោយស្វ័យភាព។ បំពាក់ដោយ AI យន្តហោះគ្មានមនុស្សបើកអាចជៀសវាងការប៉ះទង្គិចគ្នាក្នុងអំឡុងពេលរុករក កែលម្អការគ្រប់គ្រងដី និងដំណាំ (Inoue, 2020) និងកាត់បន្ថយកម្លាំងពលកម្ម និងភាពតានតឹងសម្រាប់មនុស្សជាតិ (BK Sharma et al., 2019)។
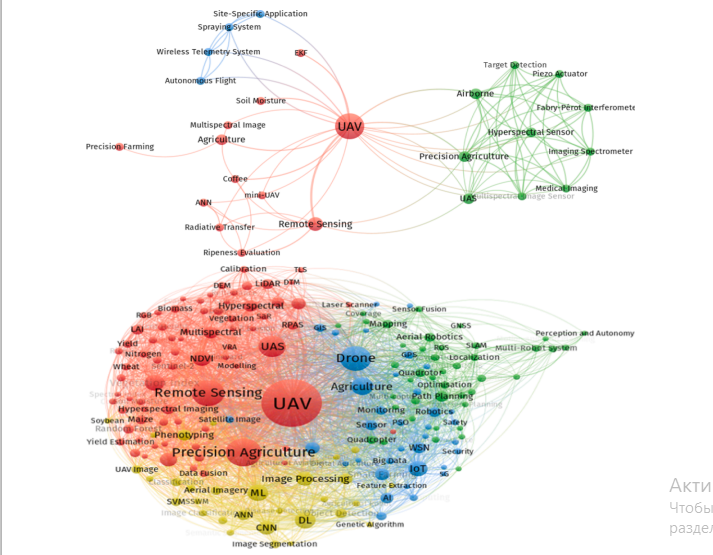
ដោយសារភាពបត់បែន និងសមត្ថភាពក្នុងការគ្រប់គ្រងទិន្នន័យមិនលីនេអ៊ែរយ៉ាងច្រើន បច្ចេកទេស AI គឺជាវិធីសាស្ត្រសមស្របក្នុងការវិភាគទិន្នន័យដែលបញ្ជូនដោយយន្តហោះគ្មានមនុស្សបើក និងប្រព័ន្ធចាប់សញ្ញាពីចម្ងាយ និងប្រព័ន្ធមូលដ្ឋានផ្សេងទៀតសម្រាប់ការទស្សន៍ទាយ និងការសម្រេចចិត្ត (Ali et al., 2015; Inoue, 2020) ។ លើសពីនេះ វត្តមានរបស់ “IoT” នៅក្នុងដំណាក់កាលទីពីរបង្ហាញពីតួនាទីដែលកំពុងរីកចម្រើនរបស់ខ្លួននៅក្នុងវិស័យកសិកម្ម។ IoT កំពុងធ្វើបដិវត្តន៍កសិកម្មដោយការតភ្ជាប់គ្នារវាងបច្ចេកវិជ្ជាផ្សេងទៀត រួមមានដ្រូន, ML, DL, WSNs និងទិន្នន័យធំ។ អត្ថប្រយោជន៍សំខាន់មួយនៃការអនុវត្ត IoT គឺសមត្ថភាពរបស់វាក្នុងការរួមបញ្ចូលការងារផ្សេងៗប្រកបដោយប្រសិទ្ធភាព និងប្រសិទ្ធភាព (ការទទួលបានទិន្នន័យ ការវិភាគទិន្នន័យ និងដំណើរការ ការសម្រេចចិត្ត និងការអនុវត្ត) ក្នុងពេលជាក់ស្តែង (Elijah et al., 2018; Feng et al. , 2019; Muangprathub et al., 2019)។ លើសពីនេះ យន្តហោះគ្មានមនុស្សបើកត្រូវបានចាត់ទុកថាជាឧបករណ៍ដ៏មានប្រសិទ្ធភាពសម្រាប់ចាប់យកទិន្នន័យដែលចាំបាច់សម្រាប់ការគណនាភាពរឹងមាំ និងលក្ខណៈសម្បត្តិនៃរុក្ខជាតិ (Candiago et al., 2015)។ រូប 2a និង 2b បង្ហាញអំពីបណ្តាញការកើតឡើងនៃពាក្យគន្លឹះសម្រាប់រយៈពេលទាំងពីរ។
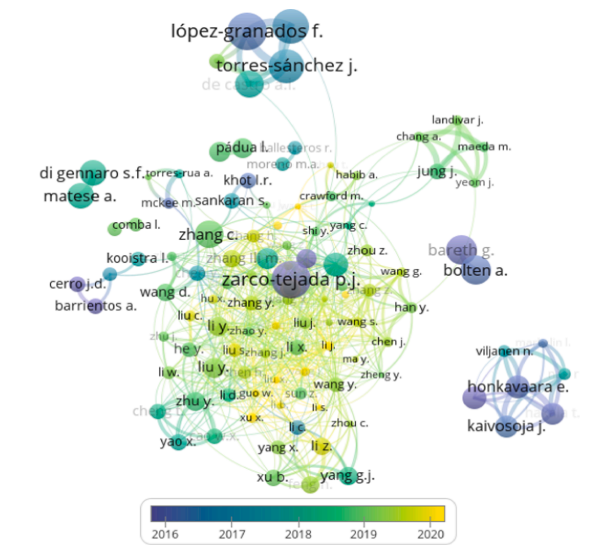
អ្នកនិពន្ធដ៏មានឥទ្ធិពល
នៅក្នុងផ្នែកនេះ យើងកំណត់អ្នកនិពន្ធដែលមានឥទ្ធិពល និងពិនិត្យមើលពីរបៀបដែលបណ្តាញដកស្រង់អ្នកនិពន្ធអាចស្រមៃឃើញ និងរៀបចំអក្សរសិល្ប៍បច្ចុប្បន្ន។ រូបទី 3 បង្ហាញពីការត្រួតគ្នាតាមកាលប្បវត្តិរបស់អ្នកស្រាវជ្រាវទាំងអស់ដែលមានចំនួនការដកស្រង់ច្រើនជាងគេ។ មាត្រដ្ឋានពណ៌ឆ្លុះបញ្ចាំងពីការប្រែប្រួលប្រចាំឆ្នាំនៃការដកស្រង់របស់អ្នកនិពន្ធ។ យើងពិនិត្យមើលរចនាសម្ព័ន្ធការដកស្រង់របស់អ្នកស្រាវជ្រាវដែលបានបោះពុម្ពផ្សាយការសិក្សាលើយន្តហោះគ្មានមនុស្សបើកកសិកម្មដោយប្រើកម្រិតនៃការដកស្រង់យ៉ាងហោចណាស់ 50 និងការបោះពុម្ពដប់។ ចេញពី
អ្នកនិពន្ធ 12,891 នាក់ មានតែ 115 នាក់ប៉ុណ្ណោះដែលបានជួបលក្ខខណ្ឌនេះ។ តារាងទី 4 រាយបញ្ជីអ្នកនិពន្ធដែលមានឥទ្ធិពលកំពូលទាំងដប់ ដោយតម្រៀបតាមចំនួនអតិបរិមានៃការដកស្រង់។ Lopez- Granados F. នាំមុខគេក្នុងបញ្ជីដោយមាន 1,963 ដកស្រង់ បន្ទាប់មកដោយ Zarco-Tejada PJ ដែលមាន 1,909 ដកស្រង់។
បញ្ជីឈ្មោះអ្នកនិពន្ធភាគច្រើន។
| ចំណាត់ថ្នាក់ | អ្នកនិពន្ធ | អាគតដ្ឋាន |
| 1 | Lopez-Granados 'F. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | Pena ˜ JM | 1,644 |
| 4 | Torres-S' អាន់ឆេស ជេ. | 1,576 |
| 5 | ហ្វឺរ៉េស អ៊ី | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | Bolten A | 1,160 |
| 8 | លោក Bareth G | 1,155 |
| 9 | Berni JA | 1,132 |
| 10 | de Castro AI | 1,036 |
នៅពេលនិយាយអំពីការបោះពុម្ពបុគ្គល អត្ថបទរបស់ Zhang and Kovacs (2012) គឺជាការសិក្សាដែលបានលើកឡើងច្រើនបំផុតដែលត្រូវបានបោះពុម្ពនៅក្នុង Precision Agriculture ។ នៅទីនេះ អ្នកនិពន្ធបានពិនិត្យមើលការអនុវត្ត UAS ក្នុងវិស័យកសិកម្មច្បាស់លាស់។ ការរកឃើញនៃការស្រាវជ្រាវរបស់ពួកគេបង្ហាញថា មានតម្រូវការដើម្បីជំរុញការរចនាវេទិកា ការផលិត ស្តង់ដារនៃរូបភាព georeferencing និងលំហូរការងារទាញយកព័ត៌មាន ដើម្បីផ្តល់ឱ្យកសិករនូវផលិតផលចុងក្រោយដែលអាចទុកចិត្តបាន។ លើសពីនេះ ពួកគេណែនាំឲ្យមានការពាក់ព័ន្ធជាមួយកសិករកាន់តែខ្លាំង ជាពិសេសនៅក្នុងការធ្វើផែនការវាល ការចាប់យករូបភាព ក៏ដូចជាការបកស្រាយ និងការវិភាគទិន្នន័យ។ សំខាន់ ការសិក្សានេះគឺស្ថិតក្នុងចំណោមអ្នកដំបូងដែលបង្ហាញពីសារៈសំខាន់នៃ UAV ក្នុងការធ្វើផែនទីវាល ការធ្វើផែនទីរឹងមាំ ការវាស់វែងមាតិកាគីមី ការត្រួតពិនិត្យភាពតានតឹងនៃបន្លែ និងការវាយតម្លៃផលប៉ះពាល់នៃជីលើការលូតលាស់របស់រុក្ខជាតិ។ បញ្ហាប្រឈមទាក់ទងនឹងបច្ចេកវិទ្យាក៏រួមបញ្ចូលផងដែរនូវការចំណាយហាមឃាត់ សមត្ថភាពឧបករណ៍ចាប់សញ្ញា ស្ថេរភាពនៃវេទិកា និងភាពជឿជាក់ កង្វះស្តង់ដារ និងនីតិវិធីជាប់លាប់ក្នុងការវិភាគបរិមាណដ៏ធំនៃទិន្នន័យ។
ការវិភាគដកស្រង់
ការវិភាគការដកស្រង់តំណាងឱ្យការសិក្សាអំពីឥទ្ធិពលនៃអត្ថបទ ទោះបីជាងាយនឹងហូរចេញក៏ដោយ (ឧ. ការលំអៀង ការដកស្រង់ដោយខ្លួនឯង) ត្រូវបានចាត់ទុកថាជាឧបករណ៍ស្តង់ដារមួយសម្រាប់ការវាយតម្លៃផលប៉ះពាល់ (Osareh, 1996; A. Rejeb et al., 2022; Sarli et al., 2010)។ ការដកស្រង់ក៏ឆ្លុះបញ្ចាំងពីសារៈសំខាន់ និងភាពរឹងមាំនៃការរួមចំណែករបស់ឯកសារចំពោះអក្សរសិល្ប៍លើប្រធានបទជាក់លាក់មួយ (R. Sharma et al., 2022)។ យើងបានធ្វើការវិភាគដកស្រង់ដើម្បីកំណត់ពីការសិក្សាដែលមានឥទ្ធិពលបំផុតលើយន្តហោះគ្មានមនុស្សបើកកសិកម្ម និងបានសង្ខេបខ្លឹមសារ។ តារាងទី 5 បង្ហាញពីបញ្ជីឯកសារដែលមានឥទ្ធិពលបំផុតចំនួន 1990 សម្រាប់រយៈពេល 2010-2011 និង 2021-2009។ អត្ថបទដោយ Berni et al ។ (2010)b និង Austin (1990) ត្រូវបានដកស្រង់ច្រើនជាងគេក្នុងកំឡុងឆ្នាំ 2010 និង 831 ដោយមានការដកស្រង់ចំនួន 498 និង 2009 រៀងគ្នា។ Berni et al ។ (2009)b បានបង្ហាញពីសក្ដានុពលក្នុងការអភិវឌ្ឍន៍ផលិតផលវាស់ស្ទង់ពីចម្ងាយតាមបរិមាណតាមរយៈ UAV ដែលមានមូលដ្ឋានលើឧទ្ធម្ភាគចក្រ ដែលបំពាក់ដោយឧបករណ៍ចាប់សញ្ញារូបភាពពហុspectral កម្ដៅ និងក្រុមតូចចង្អៀតដែលមានតម្លៃសមរម្យ។ បើប្រៀបធៀបទៅនឹងឧបករណ៍ចាប់សញ្ញាខ្យល់តាមអាកាសបែបប្រពៃណី ប្រព័ន្ធ UAV ដែលមានតម្លៃទាបសម្រាប់វិស័យកសិកម្មអាចសម្រេចបាននូវការប៉ាន់ស្មានប្រៀបធៀបនៃប៉ារ៉ាម៉ែត្រជីវរូបវិទ្យានៃដំណាំ ប្រសិនបើមិនប្រសើរជាង។ ការចំណាយដែលអាចទទួលយកបាន និងភាពបត់បែនក្នុងប្រតិបត្តិការ រួមជាមួយនឹងដំណោះស្រាយវិសាលគមខ្ពស់ លំហ និងបណ្ដោះអាសន្នដែលមាននៅពេលផ្លាស់ប្តូររហ័ស បង្ហាញ UAVs សមរម្យសម្រាប់កម្មវិធីជាច្រើនដែលត្រូវការការគ្រប់គ្រងពេលវេលាសំខាន់ៗ រួមទាំងការកំណត់ពេលប្រព័ន្ធធារាសាស្រ្ត និងការធ្វើកសិកម្មច្បាស់លាស់។ ក្រដាសពី Berni et al ។ (2010)b ត្រូវបានលើកឡើងយ៉ាងខ្លាំង ព្រោះវារួមបញ្ចូលគ្នាយ៉ាងមានប្រសិទ្ធភាពនូវវេទិការបង្វិលគ្មានមនុស្សបើក និងឧបករណ៍ចាប់សញ្ញាឌីជីថល និងកម្ដៅជាមួយនឹងយន្តការក្រិតខ្នាតចាំបាច់សម្រាប់កម្មវិធីកសិកម្ម។ ការបោះពុម្ភផ្សាយដែលត្រូវបានដកស្រង់ច្រើនជាងគេទីពីរគឺជាសៀវភៅដែលនិពន្ធដោយ Austin (XNUMX) ដែលបានពិភាក្សាអំពី UAVs ពីទិដ្ឋភាពនៃការរចនា ការអភិវឌ្ឍន៍ និងការដាក់ពង្រាយ។ ក្នុងវិស័យកសិកម្ម យាន UAVs គាំទ្រការត្រួតពិនិត្យដំណាំដោយការរកឃើញជំងឺទាន់ពេលតាមរយៈការផ្លាស់ប្តូរពណ៌ដំណាំ សម្រួលដល់ការសាបព្រួស និងការបាញ់ថ្នាំ និងការតាមដាន និងជំរុញហ្វូងសត្វ។
ការសិក្សារបស់ Sullivan et al ។ (2007), Lumme et al ។ (2008) និង Gokto ¨ ǧan et al ។ (2010) បញ្ចប់បញ្ជីនៃអត្ថបទដែលបានលើកឡើងច្រើនបំផុតចំនួនដប់ប្រាំ។ អត្ថបទទាំងនេះបង្ហាញពីការអភិវឌ្ឍន៍ប្រព័ន្ធ UAV ដែលមានមូលដ្ឋានលើវិស័យកសិកម្ម។ ពួកគេផ្តល់ដំណោះស្រាយចំពោះបញ្ហាផ្សេងៗ ដូចជាការត្រួតពិនិត្យដំណាំ និងការស្កេន ការឃ្លាំមើល និងការគ្រប់គ្រងស្មៅ និងការគាំទ្រការសម្រេចចិត្ត។ ពួកគេក៏បានផ្តល់យោបល់ និងពិភាក្សាអំពីសមត្ថភាពរបស់ UAV ក្នុងការបង្កើនប្រសិទ្ធភាពគំរូ និងជួយកសិករក្នុងការរៀបចំឱ្យបានត្រឹមត្រូវ និងមានប្រសិទ្ធភាព។
យុទ្ធសាស្ត្រដាំ។ ឯកសារចំនួនពីរត្រូវបាននិពន្ធដោយ Berni (Berni et al., 2009b; Berni et al., 2009a) ដែលបញ្ជាក់ពីផលប៉ះពាល់យ៉ាងសំខាន់របស់គាត់លើការស្រាវជ្រាវដែលទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើក។ ក្រដាសពី Zarco-Tejada et al ។ (2014) ស្ថិតក្នុងចំណោមការសិក្សាត្រួសត្រាយ ដើម្បីបង្ហាញពីតម្រូវការក្នុងការប្រើប្រាស់រូបភាព UAV ដែលមានតម្លៃទាបក្នុងការគណនាកម្ពស់ដើមឈើ។
បញ្ជីនៃការបោះពុម្ពផ្សាយភាគច្រើន។
| ហ | ពី 1990 ដល់ 2010 ។ | ពី 2011 ដល់ 2021 ។ | ||
| ឯកសារ | ការដកស្រង់ | ឯកសារ | ការដកស្រង់ | |
| 1 | (Berni et al., 2009b) | 831 | (C. Zhang & Kovacs, 2012) | 967 |
| 2 | (អូស្ទីន ឆ្នាំ ២០១០) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (Hunt et al., 2010) | 331 | (Floreano & Wood, 2015) | 552 |
| 4 | (SR Herwitz et al ។ , 2004) | 285 | (Hossein Motlagh et al ។ , 2016) | 391 |
| 5 | (CCD Lelong et al ។ , 2008) | 272 | ( Shakhatreh et al ។ , 2019) | 383 |
| 6 | (Berni et al., 2009b) | 250 | (Ma et al., 2017) | 373 |
| 7 | (Grenzdorfer ¨ et al ។ , 2008) | 198 | (Bendig et al ។ , 2014) | 360 |
| 8 | (Hrabar et al., 2005) | 175 | (Zarco-Tejada et al ។ , 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (Ad˜ អូ et al ។ , 2017) | 335 |
| 10 | ( Schmale III et al ។ , 2008) | 119 | (Honkavaara et al ។ , 2013a) | 331 |
| 11 | (Abd-Elrahman et al ។ , 2005) | 79 | (Candiago et al ។ , 2015) | 327 |
| 12 | (Techy et al., 2010) | 69 | (Xiang & Tian, 2011) | 307 |
| 13 | (Sullivan et al., 2007) | 51 | (Matese et al ។ , 2015) | 303 |
| 14 | (Lumme et al., 2008) | 42 | (Gago et al ។ , 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al., 2010) | 40 | (Aasen et al., 2015a) | 269 |
ក្នុងរយៈពេលទីពីរ (2011-2021) ការស្រាវជ្រាវដោយ Zhang and Kovacs (2012) និង Nex and Remondino (2014) បណ្តាលឱ្យមានការបោះពុម្ពផ្សាយញឹកញាប់បំផុត។ Zhang and Kovacs (2012) អះអាងថា កសិកម្មដែលមានភាពជាក់លាក់អាចទទួលបានអត្ថប្រយោជន៍ពីការអនុវត្តបច្ចេកទេស និងឧបករណ៍ចាប់សញ្ញាភូមិសាស្ត្រ ដូចជាប្រព័ន្ធព័ត៌មានភូមិសាស្ត្រ GPS និងការចាប់សញ្ញាពីចម្ងាយ ដើម្បីចាប់យកការប្រែប្រួលក្នុងវិស័យនេះ និងដោះស្រាយវាដោយប្រើប្រាស់យុទ្ធសាស្រ្តជំនួស។ ក្នុងនាមជាអ្នកផ្លាស់ប្តូរហ្គេមក្នុងវិស័យកសិកម្មច្បាស់លាស់ ការទទួលយកយន្តហោះគ្មានមនុស្សបើកបានប្រកាសអំពីយុគសម័យថ្មីក្នុងការចាប់សញ្ញាពីចម្ងាយ សម្រួលការសង្កេតពីលើអាកាស ចាប់យកទិន្នន័យកំណើនដំណាំ ស្ថានភាពដី និងតំបន់បាញ់ថ្នាំ។ ការពិនិត្យឡើងវិញនៃ Zhang and Kovacs (2012) មានលក្ខណៈស្មុគ្រស្មាញ ដោយសារវាផ្តល់នូវការយល់ដឹងអំពី UAVs ដោយបង្ហាញពីការប្រើប្រាស់ និងបញ្ហាប្រឈមនៃឧបករណ៍ទាំងនេះក្នុងការត្រួតពិនិត្យបរិស្ថាន និងកសិកម្មច្បាស់លាស់ ដូចជាការកំណត់វេទិកា និងកាមេរ៉ា បញ្ហាប្រឈមក្នុងដំណើរការទិន្នន័យ ការចូលរួមរបស់កសិករ និងបទប្បញ្ញត្តិអាកាសចរណ៍។ . ទីពីរ
ការសិក្សាដែលបានដកស្រង់ភាគច្រើនពី Nex និង Remondino (2014) បានពិនិត្យមើលស្ថានភាពសិល្បៈនៃ UAVs សម្រាប់ការចាប់យក ដំណើរការ និងវិភាគរូបភាពផែនដី។
ការងាររបស់ពួកគេក៏បានបង្ហាញពីទិដ្ឋភាពទូទៅនៃវេទិកា UAV កម្មវិធី និងករណីប្រើប្រាស់ជាច្រើន ដោយបង្ហាញពីភាពជឿនលឿនថ្មីបំផុតក្នុងដំណើរការរូបភាព UAV ។ ក្នុងវិស័យកសិកម្ម កសិករអាចប្រើប្រាស់ UAVs ដើម្បីធ្វើការសម្រេចចិត្តប្រកបដោយប្រសិទ្ធភាព ដើម្បីសម្រេចបាននូវការចំណាយ និងការសន្សំពេលវេលា ទទួលបានកំណត់ត្រាយ៉ាងឆាប់រហ័ស និងច្បាស់លាស់នៃការខូចខាត និងប្រមើលមើលបញ្ហាដែលអាចកើតមាន។ ផ្ទុយពីវេទិកាអាកាសធម្មតា UAVs អាចកាត់បន្ថយការចំណាយប្រតិបត្តិការ និងកាត់បន្ថយគ្រោះថ្នាក់នៃការចូលប្រើក្នុងទីតាំងពិបាកៗ ខណៈពេលដែលនៅតែរក្សាបាននូវសក្តានុពលភាពជាក់លាក់ខ្ពស់។ ក្រដាសរបស់ពួកគេសង្ខេបពីអត្ថប្រយោជន៍ផ្សេងៗនៃ UAVs ជាពិសេសទាក់ទងនឹងភាពត្រឹមត្រូវ និងដំណោះស្រាយ។
ក្នុងចំណោមការបោះពុម្ពផ្សាយដែលបានលើកឡើងច្រើនបំផុតចំនួន 2011 ដែលនៅសល់រវាងឆ្នាំ 2021 និង 2014 យើងបានកត់សម្គាល់ពីការផ្តោតអារម្មណ៍កាន់តែខ្លាំងលើការស្រាវជ្រាវដែលភ្ជាប់ទៅនឹងកម្មវិធីយន្តហោះគ្មានមនុស្សបើកនៅក្នុងបេសកកម្មរូបភាព (Bendig et al., 2017; Ma et al., 2014; Zarco-Tejada et al., 2015) កសិកម្មច្បាស់លាស់ (Candiago et al., 2013; Honkavaara et al., 2015a), វប្បធ៌មភាពជាក់លាក់ (Matese et al., 2015), ការវាយតម្លៃភាពតានតឹងទឹក (Gago et al., 2015) និងការត្រួតពិនិត្យបន្លែ (Aasen et al. , XNUMX ក). នៅដើមឆ្នាំអ្នកស្រាវជ្រាវបានផ្តោតអារម្មណ៍
បន្ថែមទៀតលើការបង្កើតប្រព័ន្ធដែលមានមូលដ្ឋានលើ UAV ដែលមានតម្លៃទាប ទម្ងន់ស្រាល និងច្បាស់លាស់សម្រាប់វិស័យកសិកម្ម។ ការស្រាវជ្រាវថ្មីៗបន្ថែមទៀតបានផ្តោតលើការពិនិត្យឡើងវិញនៃកម្មវិធី UAV សម្រាប់វិស័យកសិកម្ម និងការស្ទង់មតិវាល។ សរុបមក ការវិភាគនេះបង្ហាញថាការបោះពុម្ពផ្សាយដែលមានឥទ្ធិពលភាគច្រើនបានផ្តល់ការពិនិត្យឡើងវិញនៃការសិក្សាពីមុនដើម្បីវាយតម្លៃស្ថានភាពវិទ្យាសាស្ត្រ និងបច្ចេកវិទ្យាបច្ចុប្បន្នរបស់ UAVs និងបានបង្កើតប្រព័ន្ធ UAV ដើម្បីគាំទ្រដល់កសិកម្មច្បាស់លាស់។ គួរឱ្យចាប់អារម្មណ៍យើងមិនបានរកឃើញការសិក្សាដែលប្រើ empirical ទេ។
វិធីសាស្រ្ត ឬករណីសិក្សាពិពណ៌នា ដែលបង្កើតជាគម្លាតចំណេះដឹងដ៏សំខាន់ និងអំពាវនាវឱ្យមានការស្រាវជ្រាវបន្ថែមលើប្រធានបទនេះ។
ការវិភាគការដកស្រង់រួមគ្នា
យោងទៅតាម Gmür (2006) ការវិភាគការដកស្រង់រួមគ្នាកំណត់ការបោះពុម្ពផ្សាយស្រដៀងគ្នា ហើយដាក់ជាក្រុម។ ការពិនិត្យដោយប្រុងប្រយ័ត្ននៃចង្កោមអាចបង្ហាញពីវាលស្រាវជ្រាវទូទៅក្នុងចំណោមការបោះពុម្ពផ្សាយ។ យើងស៊ើបអង្កេតការដកស្រង់សំណេរនៃអក្សរសិល្ប៍ដែលទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើកកសិកម្ម ដើម្បីបង្ហាញពីប្រធានបទពាក់ព័ន្ធ និងរកឃើញគំរូបញ្ញានៃការបោះពុម្ពផ្សាយ។ ក្នុងន័យនេះ Small (1973) បានផ្តល់អនុសាសន៍ឱ្យប្រើការវិភាគ cocitation ដើម្បីសិក្សាការស្រាវជ្រាវដែលមានឥទ្ធិពលបំផុត និង seminal
នៅក្នុងវិន័យមួយ។ ដើម្បីកំណត់ការកំណត់ទៅអត្ថបទដែលបង្រៀនភាគច្រើន (Goyal & Kumar, 2021) យើងបានកំណត់កម្រិតនៃការដកស្រង់រួមនៃ 25 ដែលមានន័យថាអត្ថបទពីរត្រូវតែត្រូវបានដកស្រង់ជាមួយគ្នានៅក្នុងបញ្ជីឯកសារយោងនៃការបោះពុម្ពផ្សេងគ្នា 25 ឬច្រើនជាងនេះ។ ការដាក់ចង្កោមក៏ត្រូវបានធ្វើឡើងជាមួយទំហំចង្កោមអប្បបរមា 1 និងដោយគ្មានវិធីណាមួយសម្រាប់ការបញ្ចូលចង្កោមតូចជាងជាមួយនឹងចង្កោមធំជាង។ ជាលទ្ធផល ចង្កោមចំនួនប្រាំមួយត្រូវបានបង្កើតឡើងដោយផ្អែកលើភាពស្រដៀងគ្នានៃការសិក្សា និងរចនាសម្ព័ន្ធបញ្ញារបស់ពួកគេ។ តារាងទី 6 បង្ហាញពីការបែងចែកការបោះពុម្ពផ្សាយនៅក្នុងចង្កោមនីមួយៗ។
ចង្កោមទី 1៖ ចង្កោមនេះមានឯកសារចំនួន 2018 ដែលបានចេញផ្សាយបន្ទាប់ពីការបោះពុម្ពផ្សាយនៅក្នុងចង្កោមនេះពិភាក្សាអំពីតួនាទីរបស់យន្តហោះគ្មានមនុស្សបើកក្នុងការគាំទ្រការត្រួតពិនិត្យបរិស្ថាន ការគ្រប់គ្រងដំណាំ និងការគ្រប់គ្រងស្មៅ។ ឧទាហរណ៍ Manfreda et al ។ (XNUMX) ផ្តល់នូវទិដ្ឋភាពទូទៅនៃការស្រាវជ្រាវ និងការអនុវត្តបច្ចុប្បន្ននៃ UAV ក្នុងការត្រួតពិនិត្យប្រព័ន្ធអេកូឡូស៊ីកសិកម្មធម្មជាតិ ហើយអះអាងថា បច្ចេកវិទ្យាផ្តល់នូវសក្តានុពលយ៉ាងខ្លាំងក្នុងការលើកកម្ពស់យ៉ាងខ្លាំងនូវការត្រួតពិនិត្យបរិស្ថាន និងកាត់បន្ថយ។
គម្លាតដែលមានស្រាប់រវាងការសង្កេតលើវាល និងការចាប់សញ្ញាពីចម្ងាយតាមអាកាស និងលំហអាកាសធម្មតា។ នេះអាចត្រូវបានធ្វើដោយការផ្តល់ជូននូវសមត្ថភាពថ្មីសម្រាប់ការទាញយកបណ្ដោះអាសន្ន និងការយល់ដឹងពីលំហដែលប្រសើរឡើងចូលទៅក្នុងតំបន់ធំក្នុងវិធីដែលមានតម្លៃសមរម្យ។ UAVs អាចដឹងពីបរិស្ថានជានិច្ច ហើយបញ្ជូនទិន្នន័យលទ្ធផលទៅអង្គភាពឆ្លាតវៃ មជ្ឈិម/វិមជ្ឈការ ដែលគ្រប់គ្រងឧបករណ៍ចាប់សញ្ញាដើម្បីកំណត់បញ្ហាជាយថាហេតុ ដូចជាកង្វះជំងឺ ឬការរកឃើញទឹក (Padua ´ et al., 2017)។ អាដាវ ˜ et al ។ (2017) សន្មតថា UAVs គឺល្អសម្រាប់ការវាយតម្លៃលក្ខខណ្ឌរបស់រុក្ខជាតិដោយចាប់យកទិន្នន័យឆៅយ៉ាងច្រើនដែលទាក់ទងនឹងស្ថានភាពទឹក ការប៉ាន់ប្រមាណជីវម៉ាស់ និងការវាយតម្លៃកម្លាំង។ ឧបករណ៍ចាប់សញ្ញា UAV-mounted ក៏អាចត្រូវបានដាក់ឱ្យប្រើប្រាស់ភ្លាមៗក្នុងលក្ខខណ្ឌបរិស្ថានត្រឹមត្រូវ ដើម្បីអនុញ្ញាតឱ្យចាប់យកទិន្នន័យពីចម្ងាយបានទាន់ពេលវេលា (Von Bueren et al., 2015) ។ តាមរយៈ UAVs កសិករអាចអនុវត្តសកម្មភាពកសិកម្មក្នុងផ្ទះដោយទទួលបាននូវការវាស់វែងពីកន្លែងណាមួយនៅក្នុងលំហបីវិមាត្រនៃបរិយាកាសកសិកម្មក្នុងផ្ទះ (ឧទាហរណ៍ ផ្ទះកញ្ចក់) ដោយហេតុនេះធានាបាននូវការគ្រប់គ្រងអាកាសធាតុក្នុងតំបន់ និងការត្រួតពិនិត្យរុក្ខជាតិ (Roldan ´ et al ។, 2015) ។ នៅក្នុងបរិបទនៃភាពជាក់លាក់
កសិកម្ម ការសម្រេចចិត្តលើការគ្រប់គ្រងដំណាំ ត្រូវការទិន្នន័យដំណាំត្រឹមត្រូវ និងអាចទុកចិត្តបាន ជាមួយនឹងដំណោះស្រាយបណ្ដោះអាសន្ន និងទំហំសមស្រប (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019)។ សម្រាប់ហេតុផលនេះ Agüera Vega et al ។ (2015) បានប្រើប្រព័ន្ធឧបករណ៍ចាប់សញ្ញាពហុspectral ដែលភ្ជាប់ដោយ UAV ដើម្បីទទួលបានរូបភាពនៃដំណាំផ្កាឈូករ័ត្នក្នុងរដូវដាំដុះ។ ដូចគ្នានេះដែរ Huang et al ។ (2009) ចំណាំថាការចាប់សញ្ញាពីចម្ងាយដោយផ្អែកលើ UAVs អាចជួយសម្រួលដល់ការវាស់វែងដំណាំ និងដីពីទិន្នន័យវិសាលគមដែលប្រមូលបាន។ Verger et al ។ (2014) បានបង្កើត និងសាកល្បងបច្ចេកទេសសម្រាប់ការប៉ាន់ប្រមាណសន្ទស្សន៍តំបន់បៃតង (GAI) ពីការវាស់វែងឆ្លុះបញ្ចាំងពី UAV នៅក្នុងកម្មវិធីកសិកម្មច្បាស់លាស់ ដោយផ្តោតលើដំណាំស្រូវសាលី និងដំណាំពោត។ ដូច្នេះ យន្តហោះគ្មានមនុស្សបើកផ្តល់លទ្ធភាពថ្មីសម្រាប់ការទាញយកព័ត៌មានអំពីស្ថានភាពដំណាំជាមួយនឹងការពិនិត្យមើលឡើងវិញញឹកញាប់ និងដំណោះស្រាយទំហំខ្ពស់ (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016)។
ការប្រមូលផ្តុំការបោះពុម្ពផ្សាយដ៏មានឥទ្ធិពលលើយន្តហោះគ្មានមនុស្សបើកកសិកម្ម។
| ចង្កោម | ប្រធានបទទូលំទូលាយ | ឯកសារយោង |
| 1 | ការត្រួតពិនិត្យបរិស្ថាន, ដំណាំ ការគ្រប់គ្រង, ការគ្រប់គ្រងស្មៅ | (Ad˜ អូ et al ។ , 2017; អាហ្គៀរ៉ាវេហ្គា et al ។ , 2015; de Castro et al ។ , 2018; Gomez-Cand ´on´ et al., 2014; យ.ប Huang et al ។ , 2013; Khanal et al ។ ឆ្នាំ ២០១៧; Lopez-Granados, ´ 2017; Manfreda et al ។ , 2018; ភី អាឌូ et al ។ ឆ្នាំ ២០១៧; Pena ˜ et al ។ , 2017; ប៉េរ៉េស-អ័រទីស et al ។ , 2015; Rasmussen et al ។ , 2013, ឆ្នាំ ២០១៦; Torres-S' anchez et al ។ , 2014; Torres-Sanchez, 'Lopez-Granados, ' & Pena, ˜ 2015; Verger et al ។ , 2014; វ៉ុន Bueren et al ។ , 2015; C. Zhang & Kovacs, 2012) |
| 2 | phenotyping ពីចម្ងាយ, ទិន្នផល ការប៉ាន់ស្មាន, គំរូផ្ទៃដំណាំ, ការរាប់រុក្ខជាតិ | (Bendig et al ។ , 2013, 2014; Geipel et al ។ , 2014; Gnadinger ¨ & Schmidhalter, 2017; ហាកហាយតាឡាប et al ។ , 2016; Holman et al ។ , 2016; ជិន et al ។ , 2017; W. Li et al., 2016; Maimaitijiang et al ។ , 2017; សង្ក្រាន្ត et al ។ , 2015; Schirrmann et al ។ , 2016; Shi et al ។ , 2016; Yue et al ។ , 2017; X. Zhou et al ។ , 2017) |
| 3 | រូបភាពកំដៅសម្រាប់ទឹក រូបភាពពហុspectral | (Baluja et al ។ , 2012; Berni et al ។ , ឆ្នាំ ២០០៩ ខ; Berni et al ។ , 2009a ; Candiago et al ។ , 2015; Gago et al ។ , 2015; Gonzalez-Dugo et al ។ , 2013, 2014; Grenzdorffer ¨ et al., 2008; ខាលីក et al ។ , 2019; Matese et al ។ , 2015; Ribeiro-Gomes et al ។ , 2017; Santesteban et al ។ , 2017; Uto et al ។ 2013) |
| 4 | ការថតកាំរស្មីអ៊ិច, វិសាលគម រូបភាព | (Aasen et al., 2015a; Bareth et al ។ , ឆ្នាំ 2015; Hakala et al., 2013; Honkavaara et al ។ , 2013a; លូស៊ី et al ។ , 2014; Saari et al ។ , 2011; Suomalainen et al., 2014) |
| 5 | កម្មវិធី 3D-Mapping | (Jim'enez-Brenes et al ។ , 2017; Nex & Remondino, 2014; Salamí et al ។ ឆ្នាំ ២០១៦; Torres-S' Anchez, Lopez-' Granados, Serrano, et al., 2015; Zahawi et al ។ , 2015; Zarco-Tejada et al ។ , 2014) |
| 6 | ការឃ្លាំមើលកសិកម្ម | (SR Herwitz et al ។ , 2004; Hunt et al ។ , 2010; CCD Lelong et al ។ ឆ្នាំ ២០០៨; Primicerio et al ។ , 2008; ស៊ាង & Tian, 2011) |
ជាងនេះទៅទៀត យន្តហោះគ្មានមនុស្សបើកមានប្រយោជន៍សម្រាប់ការងារប្រឈមក្នុងវិស័យកសិកម្ម រួមទាំងការគូសផែនទីស្មៅផងដែរ។ រូបភាពដែលបានថតដោយឧបករណ៍បានបង្ហាញពីអត្ថប្រយោជន៍របស់វាសម្រាប់ការរកឃើញស្មៅដំបូងនៅក្នុងវាល (de Castro et al., 2018; Jim'enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados ´ et al., 2016; Rozenberg et al., 2021)។ ក្នុងន័យនេះ de Castro et al. (ឆ្នាំ 2018) បង្ហាញថា ការរួមបញ្ចូលគ្នានៃរូបភាព UAV និងការវិភាគរូបភាពផ្អែកលើវត្ថុ (OBIA) បានផ្តល់លទ្ធភាពឱ្យអ្នកអនុវត្តដើម្បីយកឈ្នះលើបញ្ហានៃការរកឃើញដោយស្វ័យប្រវត្តក្នុងដំណាំស្មៅនៅដើមរដូវ ដែលជាជំហានដ៏ធំមួយឆ្ពោះទៅមុខក្នុងការស្រាវជ្រាវស្មៅ។ ដូចគ្នានេះដែរ Pena ˜ et al ។ (2013) ចង្អុលបង្ហាញថា ការប្រើប្រាស់រូបភាពគុណភាពបង្ហាញខ្ពស់ជ្រុលពី UAV រួមជាមួយនឹងនីតិវិធី OBIA ធ្វើឱ្យវាអាចបង្កើតផែនទីស្មៅនៅក្នុងដំណាំពោតដំបូង ដែលអាចប្រើក្នុងការរៀបចំផែនការអនុវត្តវិធានការគ្រប់គ្រងស្មៅតាមរដូវ។ ភារកិច្ចលើសពីសមត្ថភាពរបស់ផ្កាយរណប និងរូបភាពតាមអាកាសតាមបែបប្រពៃណី។ បើប្រៀបធៀបទៅនឹងការចាត់ថ្នាក់រូបភាព ឬក្បួនដោះស្រាយការរកឃើញវត្ថុ បច្ចេកទេសនៃការបែងចែកតាមន័យធៀបមានប្រសិទ្ធភាពជាងក្នុងកិច្ចការគូសផែនទីស្មៅ (J. Deng et al., 2020) ដូច្នេះហើយទើបអាចឱ្យកសិកររកឃើញលក្ខខណ្ឌវាល កាត់បន្ថយការខាតបង់ និងបង្កើនទិន្នផលពេញមួយរដូវដាំដុះ (Ramesh et al., 2020)។ ការបែងចែកតាមន័យដែលផ្អែកលើការរៀនសូត្រយ៉ាងស៊ីជម្រៅក៏អាចផ្តល់នូវការវាស់វែងត្រឹមត្រូវនៃគម្របបន្លែពីរូបភាពពីលើអាកាសដែលមានគុណភាពបង្ហាញខ្ពស់ (Ramesh et al., 2020; A. Zheng et al., 2022)។ ទោះបីជាមានសក្តានុពលរបស់ពួកគេសម្រាប់ពីចម្ងាយក៏ដោយ។
ការចាប់ចំណាត់ថ្នាក់ភីកសែល បច្ចេកទេសនៃការបែងចែកតាមន័យធៀប ទាមទារការគណនាយ៉ាងសំខាន់ និងអង្គចងចាំ GPU ខ្ពស់ដោយហាមឃាត់ (J. Deng et al., 2020)។
ផ្អែកលើការរៀនម៉ាស៊ីន និង UAV, P'erez-Ortiz et al ។ (2015) បានស្នើវិធីសាស្រ្តគូសផែនទីស្មៅ ដើម្បីផ្តល់យុទ្ធសាស្រ្តគ្រប់គ្រងស្មៅជាក់លាក់តាមតំបន់ នៅពេលដែលកសិករអនុវត្តការគ្រប់គ្រងស្មៅក្រោយការកើតដំបូង។ ទីបំផុត Rasmussen et al ។ (ឆ្នាំ 2013) បានគូសបញ្ជាក់ថា យន្តហោះគ្មានមនុស្សបើកផ្តល់នូវការចាប់សញ្ញាដែលមានតំលៃថោក ជាមួយនឹងភាពបត់បែននៃដំណោះស្រាយទំហំដ៏អស្ចារ្យ។ សរុបមក ការបោះពុម្ភផ្សាយនៅក្នុងចង្កោមនេះផ្តោតលើការស្វែងរកសក្តានុពលនៃ UAVs ដើម្បីគាំទ្រការចាប់សញ្ញាពីចម្ងាយ ការត្រួតពិនិត្យដំណាំ និងការគូសផែនទីស្មៅ។ ការស្រាវជ្រាវស៊ីជម្រៅបន្ថែមគឺត្រូវការជាចាំបាច់ដើម្បីស៊ើបអង្កេតបន្ថែមទៀតអំពីរបៀបដែលកម្មវិធី Drone ក្នុងការត្រួតពិនិត្យបរិស្ថាន ការគ្រប់គ្រងដំណាំ និងការធ្វើផែនទីស្មៅអាចសម្រេចបាននូវកសិកម្មប្រកបដោយនិរន្តរភាពបន្ថែមទៀត (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J Su, Liu, et al., 2018) និងដោះស្រាយបញ្ហាអភិបាលកិច្ចនៃបច្ចេកវិទ្យានេះនៅក្នុងកម្មវិធីធានារ៉ាប់រងដំណាំ (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021)។ អ្នកស្រាវជ្រាវគួរតែផ្តោតលើការផ្ទៀងផ្ទាត់ការវាស់វែងដែលប្រមូលបាន UAV ជាមួយនឹងបច្ចេកទេសដំណើរការប្រកបដោយប្រសិទ្ធភាព ដើម្បីបង្កើនគុណភាពចុងក្រោយនៃទិន្នន័យដែលបានដំណើរការ (Manfreda et al., 2018)។ លើសពីនេះ ការអភិវឌ្ឍន៍នៃក្បួនដោះស្រាយសមស្របដែលទទួលស្គាល់ភីកសែលដែលបង្ហាញស្មៅនៅក្នុងរូបភាពឌីជីថល និងលុបបំបាត់ផ្ទៃខាងក្រោយដែលមិនពាក់ព័ន្ធក្នុងអំឡុងពេលធ្វើផែនទីស្មៅ UAV គឺត្រូវការជាចាំបាច់ (Gaˇsparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; Lopez- ´ Granados et al., 2016)។ ការស្រាវជ្រាវបន្ថែមលើការទទួលយកបច្ចេកទេសការបែងចែកតាមន័យធៀបក្នុងការទទួលស្គាល់រុក្ខជាតិ ចំណាត់ថ្នាក់ស្លឹក និងការធ្វើផែនទីជំងឺត្រូវបានស្វាគមន៍ (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020)។
ចង្កោមទី 2. ការបោះពុម្ពផ្សាយនៅក្នុងចង្កោមនេះផ្តោតលើទិដ្ឋភាពជាច្រើននៃយន្តហោះគ្មានមនុស្សបើកកសិកម្ម។ ទាក់ទងនឹង phenotyping ពីចម្ងាយ Sankaran et al ។ (2015) បានពិនិត្យឡើងវិញនូវសក្តានុពលនៃការប្រើប្រាស់រូបភាពពីលើអាកាសក្នុងរយៈកម្ពស់ទាប និងគុណភាពបង្ហាញខ្ពស់ជាមួយនឹង UAVs សម្រាប់ការធ្វើត្រាប់តាមរហ័សនៃដំណាំនៅក្នុងវាល ហើយពួកគេបានប្រកែកថា បើប្រៀបធៀបទៅនឹងឧបករណ៍ចាប់សញ្ញានៅលើដី យាន UAVs តូចៗដែលមានឧបករណ៍ចាប់សញ្ញាគ្រប់គ្រាន់ផ្តល់នូវអត្ថប្រយោជន៍ជាច្រើន ដូចជាការចូលទៅកាន់វាលកាន់តែងាយស្រួល ទិន្នន័យគុណភាពបង្ហាញខ្ពស់ ការប្រមូលទិន្នន័យប្រកបដោយប្រសិទ្ធភាព។
ការវាយតម្លៃយ៉ាងឆាប់រហ័សនៃលក្ខខណ្ឌកំណើននៃវាល និងការចំណាយប្រតិបត្តិការទាប។ ទោះជាយ៉ាងណាក៏ដោយ អ្នកនិពន្ធក៏កត់សម្គាល់ផងដែរថា ការអនុវត្តប្រកបដោយប្រសិទ្ធភាពនៃ UAV សម្រាប់ phenotyping វាលពឹងផ្អែកលើធាតុផ្សំជាមូលដ្ឋានពីរគឺ លក្ខណៈពិសេស UAV (ឧទាហរណ៍ សុវត្ថិភាព ស្ថេរភាព ទីតាំង ស្វ័យភាព) និងលក្ខណៈរបស់ឧបករណ៍ចាប់សញ្ញា (ឧទាហរណ៍ គុណភាពបង្ហាញ ទម្ងន់ រលកពន្លឺ វាល ទិដ្ឋភាព) ។ Haghighattalab et al ។ (2016) បានស្នើរបំពង់កែច្នៃរូបភាពពាក់កណ្តាលស្វ័យប្រវត្តិ ដើម្បីទាញយកទិន្នន័យកម្រិតគ្រោងពីរូបភាព UAV និងពន្លឿនដំណើរការបង្កាត់ពូជ។ Holman et al ។ (2016) បានកើនឡើងខ្ពស់។
ប្រព័ន្ធ phenotyping វាលឆ្លងកាត់ និងបានគូសបញ្ជាក់ថា UAV អាចប្រមូលទិន្នន័យ phenotypic ប្រកបដោយគុណភាព កម្រិតពន្លឺ ហើយឧបករណ៍នេះមានប្រសិទ្ធភាពសម្រាប់តំបន់ធំ និងនៅទូទាំងទីតាំងវាលផ្សេងៗគ្នា។
ដោយសារការប៉ាន់ស្មានទិន្នផលគឺជាព័ត៌មានដ៏សំខាន់មិនគួរឱ្យជឿ ជាពិសេសនៅពេលដែលអាចរកបានទាន់ពេល វាមានសក្តានុពលសម្រាប់ UAVs ដើម្បីផ្តល់នូវការវាស់វែងវាលទាំងអស់ និងទទួលបានទិន្នន័យគុណភាពខ្ពស់ប្រកបដោយប្រសិទ្ធភាព (Daakir et al., 2017; Demir et al., 2018 ; Enciso et al., 2019; Kulbacki et al., 2018; Pudelko et al., 2012)។ ក្នុងន័យនេះ Jin et al ។ (2017) បានទាញយកអត្ថប្រយោជន៍ពីរូបភាពដែលមានគុណភាពបង្ហាញខ្ពស់ដែលទទួលបានដោយ UAVs នៅរយៈកម្ពស់ទាបបំផុត ដើម្បីបង្កើត និងវាយតម្លៃវិធីសាស្រ្តសម្រាប់ការប៉ាន់ប្រមាណដង់ស៊ីតេរុក្ខជាតិស្រូវសាលីនៅដំណាក់កាលលេចឡើង។ យោងតាមអ្នកនិពន្ធ UAVs យកឈ្នះលើដែនកំណត់នៃប្រព័ន្ធ rover ដែលបំពាក់ដោយកាមេរ៉ា និងតំណាងឱ្យវិធីសាស្ត្រមិនរាតត្បាតដើម្បីប៉ាន់ប្រមាណដង់ស៊ីតេរុក្ខជាតិនៅក្នុងដំណាំ ដែលអនុញ្ញាតឱ្យកសិករសម្រេចបាននូវទិន្នផលខ្ពស់ដែលចាំបាច់សម្រាប់ការធ្វើ phenotyping វាលដោយឯករាជ្យនៃចរាចរនៃដី។ លី et al ។ (2016) បានប្រមូលរូបភាពស្តេរ៉េអូរាប់រយជាមួយនឹងគុណភាពបង្ហាញខ្ពស់ខ្លាំងដោយប្រើប្រព័ន្ធ UAV-based ដើម្បីប៉ាន់ប្រមាណប៉ារ៉ាម៉ែត្រពោត រួមទាំងកម្ពស់ដំបូល និងជីវម៉ាសពីលើដី។ ទីបំផុត Yue et al ។ (2017) បានរកឃើញថាកម្ពស់ដំណាំដែលបានកំណត់ពី UAVs អាចបង្កើនការប៉ាន់ប្រមាណជីវម៉ាស់ពីលើដី (AGB)។
វិធីសាស្រ្តមួយដើម្បីតាមដានការលូតលាស់របស់ដំណាំគឺជាគំនិតនៃការបង្កើតគំរូផ្ទៃដំណាំ (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021)។ ការសិក្សាជាច្រើនបានគូសបញ្ជាក់ពីលទ្ធភាពនៃរូបភាពដែលថតចេញពី UAV ដើម្បីចាប់យកកម្ពស់របស់រុក្ខជាតិ និងតាមដានការលូតលាស់របស់វា។ ឧទាហរណ៍ Bendig et al ។ (2013) បានពិពណ៌នាអំពីការអភិវឌ្ឍន៍នៃគំរូផ្ទៃដំណាំពហុបណ្ដោះអាសន្ន ជាមួយនឹងគុណភាពបង្ហាញខ្ពស់តិចជាង 0.05 ម៉ែត្រដោយប្រើ UAV ។ ពួកគេមានគោលបំណងស្វែងរកដំណាំ
ភាពប្រែប្រួលនៃការលូតលាស់ និងការពឹងផ្អែករបស់វាទៅលើការព្យាបាលដំណាំ ការដាំដុះ និងភាពតានតឹង។ Bendig et al ។ (2014) បានប្រើ UAVs ដើម្បីប៉ាន់ប្រមាណជីវម៉ាស់ស្រស់ និងស្ងួតដោយផ្អែកលើកម្ពស់រុក្ខជាតិដែលស្រង់ចេញពីគំរូផ្ទៃដំណាំ ហើយបានរកឃើញថា មិនដូចការស្កែនលើអាកាស និងការស្កែនឡាស៊ែរលើដីទេ រូបភាពដែលមានគុណភាពបង្ហាញខ្ពស់ពី UAVs អាចបង្កើនភាពត្រឹមត្រូវនៃគំរូកម្ពស់រុក្ខជាតិសម្រាប់ការលូតលាស់ខុសៗគ្នា។ ដំណាក់កាល។ នៅក្នុងសរសៃដូចគ្នា Geipel et al ។ (2014) បានប្រើ UAVs ក្នុងការស្រាវជ្រាវរបស់ពួកគេ ដើម្បីទទួលបានរូបភាព
សំណុំទិន្នន័យសម្រាប់ការទស្សន៍ទាយទិន្នផលគ្រាប់ធញ្ញជាតិនៅដំណាក់កាលលូតលាស់បីផ្សេងគ្នាចាប់ពីដើមដល់ពាក់កណ្តាលរដូវ ហើយបានសន្និដ្ឋានថាការរួមបញ្ចូលគ្នានៃគំរូវិសាលគម និងលំហ ដោយផ្អែកលើរូបភាពពីលើអាកាស និងគំរូផ្ទៃដំណាំ គឺជាវិធីសាស្ត្រសមរម្យសម្រាប់ការទស្សន៍ទាយទិន្នផលពោតពាក់កណ្តាលរដូវ។ ជាចុងក្រោយ Gnadinger ¨ និង Schmidhalter (2017) បានពិនិត្យឧបករណ៍ប្រើប្រាស់របស់ UAV ក្នុងការធ្វើ phenotyping ភាពជាក់លាក់ ហើយបានគូសបញ្ជាក់ថា ការប្រើប្រាស់បច្ចេកវិទ្យានេះអាចជួយបង្កើនការគ្រប់គ្រងកសិដ្ឋាន និងបើកការពិសោធន៍វាលសម្រាប់គោលបំណងបង្កាត់ពូជ និងកសិកម្ម។ សរុបមក យើងសង្កេតឃើញថា ការបោះពុម្ពផ្សាយនៅក្នុងចង្កោមទី 2 ផ្តោតលើគុណសម្បត្តិចម្បងនៃ UAVs ពីចម្ងាយ
phenotyping ការប៉ាន់ប្រមាណទិន្នផល គំរូផ្ទៃដំណាំ និងការរាប់រុក្ខជាតិ។ ការសិក្សានាពេលអនាគតអាចជីកបានកាន់តែស៊ីជម្រៅដោយការបង្កើតវិធីសាស្រ្តថ្មីសម្រាប់ phenotyping ពីចម្ងាយ ដែលអាចស្វ័យប្រវត្តិកម្ម និងបង្កើនប្រសិទ្ធភាពដំណើរការនៃទិន្នន័យពីចម្ងាយ (Barabaschi et al., 2016; Liebisch et al., 2015; Mochida et al., 2015; S. Zhou et al. ។, 2021)។ លើសពីនេះទៀត ការអនុវត្តឧបករណ៍ចាប់សញ្ញា IoT ដែលបានដំឡើងនៅលើ UAVs និងការដោះដូររវាងការចំណាយ កម្លាំងពលកម្ម និងភាពជាក់លាក់នៃការប៉ាន់ប្រមាណទិន្នផល ចាំបាច់ត្រូវស្រាវជ្រាវនៅក្នុង
អនាគត (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018)។ ជាចុងក្រោយ ចាំបាច់ត្រូវបង្កើតវិធីសាស្ត្រកែច្នៃរូបភាពប្រកបដោយប្រសិទ្ធភាព ដែលអាចបង្កើតព័ត៌មានដែលអាចទុកចិត្តបាន បង្កើនប្រសិទ្ធភាពក្នុងផលិតកម្មកសិកម្ម និងកាត់បន្ថយការងាររាប់ដោយដៃរបស់កសិករ (RU Khan et al., 2021; Koh et al., 2021; Lin & Guo, 2020; C. Zhang et al., 2020)។
ចង្កោមទី 3. ការបោះពុម្ពផ្សាយនៅក្នុងចង្កោមនេះពិភាក្សាអំពីប្រភេទផ្សេងៗនៃប្រព័ន្ធរូបភាពសម្រាប់ការចាប់សញ្ញាពីចម្ងាយនៃធនធានកសិកម្មដែលប្រើនៅលើវេទិកា UAV ។ ក្នុងន័យនេះ ការថតរូបភាពកម្ដៅអនុញ្ញាតឱ្យមានការត្រួតពិនិត្យសីតុណ្ហភាពលើផ្ទៃដើម្បីការពារការខូចខាតដំណាំ និងរកឃើញភាពតានតឹងពីគ្រោះរាំងស្ងួតឱ្យបានឆាប់ (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; Yeom, 2021)។ Baluja et al ។ (2012) បានអះអាងថា ការប្រើប្រាស់កាមេរ៉ាចម្រុះ និងកម្ដៅនៅលើយន្តហោះ
UAV បានអនុញ្ញាតឱ្យអ្នកស្រាវជ្រាវទទួលបានរូបភាពដែលមានគុណភាពបង្ហាញខ្ពស់ និងវាយតម្លៃស្ថានភាពទឹកទំពាំងបាយជូរ។ នេះអាចមានប្រយោជន៍ក្នុងការអភិវឌ្ឍន៍គំរូកំណត់ពេលទឹកប្រលោមលោកដោយប្រើទិន្នន័យចាប់សញ្ញាពីចម្ងាយ (Baluja et al., 2012)។ ដោយសារតែ
សមត្ថភាពផ្ទុកមានកំណត់នៃ UAVs, Ribeiro-Gomes et al ។ (2017) បានចាត់ទុកការរួមបញ្ចូលកាមេរ៉ាកម្ដៅដែលមិនត្រជាក់ទៅក្នុង UAVS ដើម្បីកំណត់ភាពតានតឹងទឹកនៅក្នុងរុក្ខជាតិ ដែលធ្វើឱ្យ UAVs ប្រភេទនេះមានប្រសិទ្ធភាព និងអាចសម្រេចបានជាងការចាប់សញ្ញាពីចម្ងាយដែលមានមូលដ្ឋានលើផ្កាយរណបប្រពៃណី និង UAVs ដែលបំពាក់ដោយកាមេរ៉ាកម្ដៅត្រជាក់។ យោងទៅតាមអ្នកនិពន្ធ កាមេរ៉ាកម្ដៅដែលមិនត្រជាក់គឺស្រាលជាងកាមេរ៉ាត្រជាក់ ដែលទាមទារការក្រិតតាមខ្នាតសមស្រប។ Gonzalez-Dugo et al ។ (2014) បានបង្ហាញថារូបភាពកម្ដៅបង្កើតបាននូវផែនទីលំហនៃសន្ទស្សន៍ភាពតានតឹងទឹកដំណាំសម្រាប់វាយតម្លៃស្ថានភាពទឹក និងបរិមាណភាពតានតឹងទឹកក្នុងចំណោម និងក្នុងចំការក្រូចឆ្មារ។ Gonzalez-Dugo et al ។ (2013) និង Santesteban et al ។ (2017) បានស៊ើបអង្កេតការប្រើប្រាស់រូបភាពកំដៅ UAV កម្រិតច្បាស់ខ្ពស់ ដើម្បីប៉ាន់ប្រមាណភាពប្រែប្រួលនៃស្ថានភាពទឹកនៃចំការពាណិជ្ជកម្ម និងចំការទំពាំងបាយជូរ។
ការថតរូបភាពចម្រុះអាចផ្តល់នូវទិន្នន័យដ៏ធំនៅក្នុងការប្រៀបធៀបជាមួយនឹងរូបភាព RGB ប្រពៃណី (ក្រហម បៃតង និងខៀវ) (Ad˜ ao et al., 2017; Navia et al., 2016)។ ទិន្នន័យវិសាលគមនេះ រួមជាមួយនឹងទិន្នន័យលំហ អាចជួយក្នុងការចាត់ថ្នាក់ ការធ្វើផែនទី ការព្យាករណ៍ ការព្យាករណ៍ និងគោលបំណងនៃការរកឃើញ (Berni et al., 2009b)។ នេះបើយោងតាម Candiago et al ។ (2015) ការថតរូបភាពពហុវិស័យដែលមានមូលដ្ឋានលើ UAV អាចរួមចំណែកយ៉ាងច្រើនដល់ការវាយតម្លៃដំណាំ និងកសិកម្មច្បាស់លាស់ជាធនធានដែលអាចទុកចិត្តបាន និងមានប្រសិទ្ធភាព។ ផងដែរ
Khaliq et al ។ (2019) បានធ្វើការប្រៀបធៀបរវាងផ្កាយរណប និងរូបភាពពហុspectral ដែលមានមូលដ្ឋានលើ UAV ។ រូបភាពដែលមានមូលដ្ឋានលើ UAV បណ្តាលឱ្យមានភាពច្បាស់លាស់ជាងមុនក្នុងការពិពណ៌នាអំពីការប្រែប្រួលនៃចម្ការទំពាំងបាយជូរ ក៏ដូចជាផែនទីដ៏រឹងមាំសម្រាប់តំណាងឱ្យដំណាំដំណាំ។ សរុបមក អត្ថបទនៅក្នុងចង្កោមនេះពិភាក្សាអំពីការបញ្ចូលឧបករណ៍ចាប់សញ្ញារូបភាពកម្ដៅ និងពហុវិស័យទៅក្នុង UAVs កសិកម្ម។ អាស្រ័យហេតុនេះ ការស្រាវជ្រាវបន្ថែមគឺត្រូវការជាចាំបាច់ដើម្បីស្វែងយល់ពីរបៀបដែលរូបភាពកម្ដៅ និងពហុវិសាលភាពអាចត្រូវបានរួមបញ្ចូលជាមួយ AI
បច្ចេកទេស (ឧ. ការសិក្សាស៊ីជម្រៅ) ដើម្បីរកមើលភាពតានតឹងរបស់រុក្ខជាតិ (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021)។ ការយល់ដឹងបែបនេះនឹងជួយធានាឱ្យមានការរកឃើញកាន់តែមានប្រសិទ្ធភាព និងត្រឹមត្រូវ ក៏ដូចជាការត្រួតពិនិត្យការលូតលាស់របស់រុក្ខជាតិ ភាពតានតឹង និងបាតុភូត (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., ២០២០)។
ចង្កោមទី 4. ចង្កោមនេះមានឯកសារចំនួនប្រាំពីរដែលវិលជុំវិញតួនាទីសំខាន់នៃរូបភាពវិសាលគម និងរូបភាពខ្ពស់ក្នុងការគាំទ្រការអនុវត្តកសិកម្ម។ ការថតរូបភាព Hyperspectral បានបង្កើតឡើងដោយខ្លួនវាថាជាវិធីសាស្រ្តចាប់សញ្ញាពីចម្ងាយ ដែលអនុញ្ញាតឱ្យមានការវាយតម្លៃជាបរិមាណនៃប្រព័ន្ធផែនដី (Schaepman et al., 2009)។ដើម្បីឱ្យកាន់តែច្បាស់លាស់ វាអនុញ្ញាតឱ្យកំណត់អត្តសញ្ញាណសម្ភារៈលើផ្ទៃ បរិមាណនៃការប្រមូលផ្តុំ (ទាក់ទង) និង ការកំណត់សមាមាត្រនៃផ្ទៃ
ក្នុងភីកសែលចម្រុះ (Kirsch et al., 2018; Zhao et al., 2022)។ ម្យ៉ាងវិញទៀត គុណភាពបង្ហាញវិសាលគមកាន់តែខ្ពស់ដែលផ្តល់ដោយប្រព័ន្ធ hyperspectral អនុញ្ញាតឱ្យមានការប៉ាន់ប្រមាណត្រឹមត្រូវបន្ថែមទៀតនៃប៉ារ៉ាម៉ែត្រផ្សេងៗ ដូចជាលក្ខណៈសម្បត្តិបួស ឬបរិមាណទឹកស្លឹក (Suomalainen et al., 2014)។ អ្នកស្រាវជ្រាវនៅក្នុងចង្កោមនេះបានស៊ើបអង្កេតទិដ្ឋភាពផ្សេងៗនៃប្រព័ន្ធបែបនេះ។ ក្នុងចំណោមអ្នកផ្សេងទៀត Aasen et al ។ (2015b) ផ្តល់ជូននូវវិធីសាស្រ្តពិសេសមួយសម្រាប់ការទទួលបានព័ត៌មានអុបទិកបីវិមាត្រពីទម្ងន់ស្រាល
កាមេរ៉ាថតរូបដែលប្រើនៅលើ UAVs សម្រាប់ការត្រួតពិនិត្យបន្លែ។ Lucieer et al ។ (2014) បានពិភាក្សាអំពីការរចនា ការអភិវឌ្ឍន៍ និងប្រតិបត្តិការលើអាកាសនៃ UAS ប្រលោមលោក ក៏ដូចជាការក្រិតតាមខ្នាត ការវិភាគ និងការបកស្រាយនៃទិន្នន័យរូបភាពដែលបានប្រមូលជាមួយវា។ ទីបំផុត Honkavaara et al ។ (2013b) បានបង្កើតវិធីសាស្រ្តកែច្នៃដ៏ទូលំទូលាយមួយសម្រាប់រូបភាពវិសាលគមដែលផ្អែកលើ FabryPerot interferometer និងបង្ហាញពីការប្រើប្រាស់របស់វានៅក្នុងនីតិវិធីប៉ាន់ស្មានជីវម៉ាស់សម្រាប់កសិកម្មជាក់លាក់។ ផ្លូវអនាគតដ៏មានសក្ដានុពលសម្រាប់ចង្កោមបច្ចុប្បន្ននេះរួមមានការសង្កត់ធ្ងន់លើតម្រូវការសម្រាប់ការកែលម្អបច្ចេកទេសនៅក្នុងបច្ចេកវិទ្យាឧបករណ៍ចាប់សញ្ញា (Aasen et al., 2015b) ក៏ដូចជាតម្រូវការសម្រាប់ការបញ្ចូល និងពង្រឹងបច្ចេកវិទ្យាបន្ថែម ជាពិសេសទិន្នន័យធំ និងការវិភាគ (Ang & Seng, 2021; Radoglou - Grammatikis et al ។ , 2020; Shakoor et al ។ , 2019)។ ក្រោយមកទៀត ភាគច្រើនកើតចេញពីទិន្នន័យដែលរីកចម្រើនឥតឈប់ឈរដែលបង្កើតដោយឧបករណ៍ចាប់សញ្ញាផ្សេងៗដែលបានអនុវត្តនៅក្នុងកសិកម្មឆ្លាតវៃ (C. Li & Niu, 2020; A. Rejeb et al., 2022; Y. Su & Wang, 2021)។
ចង្កោម 5. ការបោះពុម្ពផ្សាយនៅក្នុងចង្កោមនេះបានពិនិត្យកម្មវិធី 3Dmapping ដែលមានមូលដ្ឋានលើយន្តហោះគ្មានមនុស្សបើក។ ការប្រើប្រាស់យន្តហោះគ្មានមនុស្សបើកសម្រាប់ការគូសផែនទី 3D អាចកាត់បន្ថយការងារស្មុគស្មាញ និងបង្កើនប្រសិទ្ធភាពយ៉ាងច្រើន (Torres-Sanchez ´ et al., 2015) ។ អត្ថបទទាំងប្រាំនៅក្នុងចង្កោមផ្តោតជាសំខាន់លើកម្មវិធីត្រួតពិនិត្យរុក្ខជាតិ។ ឧទាហរណ៍ ដើម្បីទទួលបានទិន្នន័យបីវិមាត្រអំពីតំបន់ដំបូល កម្ពស់ដើមឈើ និងបរិមាណមកុដ Torres-Sanchez ´ et al ។ (2015) បានប្រើបច្ចេកវិទ្យា UAV ដើម្បីបង្កើតគំរូផ្ទៃឌីជីថល ហើយបន្ទាប់មក ការវិភាគរូបភាពផ្អែកលើវត្ថុ (OBIA) ខិតជិតមកដល់។ បន្ថែមទៀត Zarco-Tejada et al ។ (2014) បានកំណត់កម្ពស់ដើមឈើដោយការរួមបញ្ចូលបច្ចេកវិទ្យា UAV និងវិធីសាស្រ្តបង្កើតរូបថតបីវិមាត្រ។ Jim'enez-Brenes Lopez-Granados, 'De Castro, et al ។ (2017) បានបង្ហាញពីដំណើរការថ្មីសម្រាប់ការត្រួតពិនិត្យ 3D ពហុបណ្ដោះអាសន្ននៃដើមអូលីវរាប់សិបដើម ដោយរួមបញ្ចូលបច្ចេកវិទ្យា UAV ជាមួយនឹងវិធីសាស្រ្ត OBIA កម្រិតខ្ពស់។ ផ្លូវគួរឱ្យចាប់អារម្មណ៍សម្រាប់ការងារនាពេលអនាគតនៅក្នុងចង្កោមនេះរួមមានទាំងការកែលម្អបច្ចុប្បន្ន
វិធីសាស្រ្ត (Zarco-Tejada et al., 2014) សម្រាប់គោលបំណងធ្វើគំរូលើផ្ទៃឌីជីថល (Ajayi et al., 2017; Jaud et al., 2016) ដូចជា OBIA (de Castro et al., 2018, 2020; Ventura et al. , 2018) និងការកសាងរូបថតឡើងវិញ ឬបង្កើតវិធីសាស្រ្តប្រលោមលោក (Díaz-Varela et al., 2015; Torres-S´ anchez et al., 2015)។
ចង្កោមទី 6. ចង្កោមនេះពិភាក្សាអំពីតួនាទីរបស់យន្តហោះគ្មានមនុស្សបើកក្នុងការឃ្លាំមើលកសិកម្ម។ UAVs អាចបំពេញបន្ថែម និងយកឈ្នះលើចំណុចខ្វះខាតនៃរូបភាពផ្កាយរណប និងយន្តហោះ។ ជាឧទាហរណ៍ ពួកគេអាចផ្តល់នូវគុណភាពបង្ហាញខ្ពស់នៅជិតការថតរូបភាពក្នុងពេលជាក់ស្តែងជាមួយនឹងបញ្ហាប្រឈមដែលមិនសូវស៊ីសាំង ឬសាកល្បង ដែលបណ្តាលឱ្យមានការឃ្លាំមើលជាប្រចាំ និងក្នុងពេលជាក់ស្តែង និងការកែលម្អក្នុងការសម្រេចចិត្ត (S. Herwitz et al., 2004)។ ការរួមចំណែកដ៏សំខាន់មួយទៀតរបស់ UAVs គឺសមត្ថភាពរបស់ពួកគេក្នុងការផ្តល់នូវទិន្នន័យជាក់លាក់នៃគេហទំព័រសម្រាប់កសិកម្មជាក់លាក់ ឬការធ្វើកសិកម្មជាក់លាក់នៃគេហទំព័រដែលជាគុណភាពបង្ហាញខ្ពស់របស់ពួកគេ ទិន្នន័យលម្អិតអំពីប៉ារ៉ាម៉ែត្រផ្សេងៗអាចឱ្យកសិករបែងចែកដីទៅជាផ្នែកដូចគ្នា និងព្យាបាលពួកគេតាម (Hunt et al. , 2010; CC Lelong et al., 2008; Primicerio et al., 2012)។ ការឃ្លាំមើលកសិកម្មដែលមានមូលដ្ឋានលើ UAV បែបនេះអាចគាំទ្រដល់ការត្រួតពិនិត្យសន្តិសុខស្បៀង និងការសម្រេចចិត្ត (SR Herwitz et al., 2004)។ ដើម្បីជំរុញការស្រាវជ្រាវក្នុងការឃ្លាំមើលកសិកម្ម មិនត្រឹមតែការកែលម្អឧបករណ៍ចាប់សញ្ញា UAVs និងបច្ចេកវិទ្យាពាក់ព័ន្ធផ្សេងទៀត និងវិធីសាស្រ្តទំនាក់ទំនង និងការផ្ទេរទិន្នន័យរបស់ពួកគេគឺត្រូវការជាចាំបាច់ (Ewing et al., 2020; Shuai et al., 2019) ប៉ុន្តែក៏មានការរួមបញ្ចូលយន្តហោះគ្មានមនុស្សបើកជាមួយផ្សេងៗផងដែរ។ បច្ចេកវិទ្យាសម្រាប់បង្កើនប្រសិទ្ធភាពការងារផ្សេងៗគ្នាទាក់ទងនឹងកសិកម្មឆ្លាតវៃ ដូចជាការត្រួតពិនិត្យ ការឃ្លាំមើលកសិកម្ម និងការសម្រេចចិត្ត គឺជាតំបន់ស្រាវជ្រាវដែលមានសក្តានុពលខ្ពស់ (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018)។ ក្នុងន័យនេះ IoT, WSNs និងទិន្នន័យធំផ្តល់នូវសមត្ថភាពបំពេញបន្ថែមគួរឱ្យចាប់អារម្មណ៍ (van der Merwe et al., 2020)។ ការចំណាយលើការអនុវត្ត ការសន្សំការចំណាយ ប្រសិទ្ធភាពថាមពល និងសុវត្ថិភាពទិន្នន័យ ស្ថិតក្នុងចំណោមផ្នែកដែលស្ថិតនៅក្រោមការស្រាវជ្រាវសម្រាប់ការរួមបញ្ចូលបែបនេះ (Masroor et al., 2021)។
ប្រទេស និងស្ថាប័នសិក្សា
ជំហានចុងក្រោយរួមមានការស៊ើបអង្កេតប្រទេសដើម និងទំនាក់ទំនងសិក្សារបស់អ្នកនិពន្ធ។ តាមរយៈការវិភាគនេះ យើងមានគោលបំណងស្វែងយល់ឱ្យកាន់តែច្បាស់អំពីការបែងចែកភូមិសាស្ត្ររបស់អ្នកប្រាជ្ញដែលរួមចំណែកដល់ការអនុវត្តយន្តហោះគ្មានមនុស្សបើកក្នុងវិស័យកសិកម្ម។ គួរកត់សម្គាល់ថា ភាពចម្រុះនៃប្រទេស និងស្ថាប័នសិក្សា។ តាមទស្សនៈរបស់ប្រទេសមួយ សហរដ្ឋអាមេរិក ចិន ឥណ្ឌា និងអ៊ីតាលី ជាប់ចំណាត់ថ្នាក់កំពូលនៃបញ្ជីក្នុងលក្ខខណ្ឌនៃចំនួនបោះពុម្ពផ្សាយ (តារាងទី 7)។ នាពេលបច្ចុប្បន្ននេះ
ការស្រាវជ្រាវលើយន្តហោះគ្មានមនុស្សបើកកសិកម្មត្រូវបានផ្តោតយ៉ាងសំខាន់នៅក្នុងបណ្តាប្រទេសនៅអាមេរិកខាងជើង និងអាស៊ី ភាគច្រើនដោយសារតែការចូលរួមខ្ពស់របស់ពួកគេនៅក្នុងកម្មវិធីកសិកម្មច្បាស់លាស់។ ឧទាហរណ៍ នៅសហរដ្ឋអាមេរិក ទីផ្សារនៃយន្តហោះគ្មានមនុស្សបើកកសិកម្មត្រូវបានប៉ាន់ប្រមាណថាមានចំនួន 841.9 លានដុល្លារក្នុងឆ្នាំ 2020 ដែលស្មើនឹងប្រមាណ 30% នៃចំណែកទីផ្សារពិភពលោក (ReportLinker, 2021)។ ប្រទេសចិនត្រូវបានគេព្យាករណ៍ថានឹងឈានដល់ទំហំទីផ្សារប្រហាក់ប្រហែល 2.6 ពាន់លានដុល្លារក្នុងឆ្នាំ 2027។ ប្រទេសនេះកំពុងអំពាវនាវឱ្យយន្តហោះគ្មានមនុស្សបើកកសិកម្មដោះស្រាយបញ្ហាផលិតភាព និងសម្រេចបាននូវទិន្នផលកាន់តែប្រសើរ ការកាត់បន្ថយកម្លាំងពលកម្ម និងធាតុចូលផលិតកម្មតិចជាងមុន។ ទោះជាយ៉ាងណាក៏ដោយ ការទទួលយកបច្ចេកវិទ្យានៅក្នុងប្រទេសចិនក៏ត្រូវបានជំរុញដោយកត្តាដូចជាទំហំប្រជាជន និងតម្រូវការក្នុងការច្នៃប្រឌិត និងកែលម្អការអនុវត្តការគ្រប់គ្រងដំណាំដែលមានស្រាប់។
ប្រទេសដែលមានផលិតភាពច្រើនបំផុត និងសាកលវិទ្យាល័យ/អង្គការដែលរួមចំណែកដល់
ការស្រាវជ្រាវទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើក។
| ហ | បណ្តាប្រទេស |
| 1 | អាមេរិច |
| 2 | ប្រទេសចិន |
| 3 | ប្រទេសឥណ្ឌា |
| 4 | ប្រទេសអ៊ីតាលី |
| 5 | ប្រទេសអេស្ប៉ាញ |
| 6 | ប្រទេសអាល្លឺម៉ង់ |
| 7 | ប្រទេសប្រេស៊ីល |
| 8 | ប្រទេសអូស្រ្តាលី |
| 9 | ប្រទេសជប៉ុន |
| 10 | ចក្រភពអង់គ្លេស |
| ហ | សាកលវិទ្យាល័យ / អង្គការ |
| 1 | បណ្ឌិត្យសភាវិទ្យាសាស្ត្រចិន |
| 2 | ក្រសួងកសិកម្មនៃសាធារណៈរដ្ឋប្រជាមានិតចិន |
| 3 | ក្រុមប្រឹក្សាជាន់ខ្ពស់នៃការស្រាវជ្រាវវិទ្យាសាស្ត្រ |
| 4 | សាកលវិទ្យាល័យ Texas A&M |
| 5 | សាកលវិទ្យាល័យកសិកម្មចិន |
| 6 | សេវាស្រាវជ្រាវកសិកម្ម USDA |
| 7 | CSIC - Instituto de Agricultura Sostenible IAS |
| 8 | សាកលវិទ្យាល័យ Purdue |
| 9 | Consiglio Nazionale delle Ricerche ។ |
| 10 | សាកលវិទ្យាល័យកសិកម្មចិនខាងត្បូង |
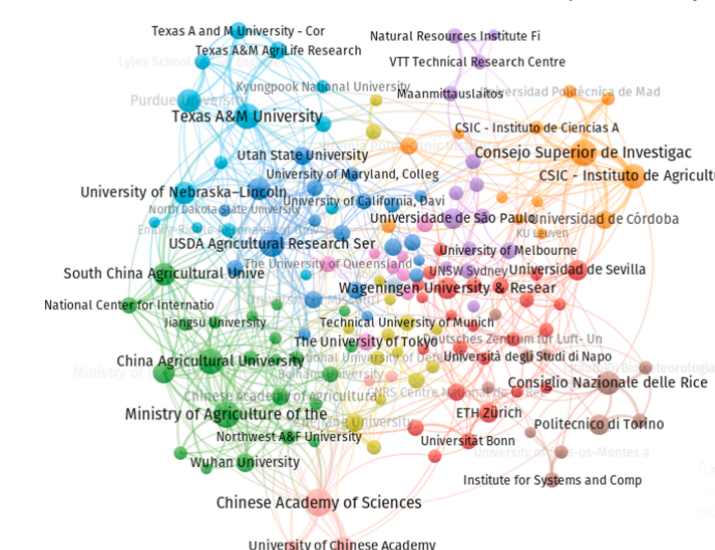
តាមទស្សនៈរបស់សាកលវិទ្យាល័យ និងស្ថាប័ន បណ្ឌិត្យសភាវិទ្យាសាស្ត្រចិនឈរលើគេក្នុងបញ្ជីនៃចំនួននៃការបោះពុម្ពផ្សាយ បន្ទាប់មកដោយក្រសួងកសិកម្មនៃសាធារណៈរដ្ឋប្រជាមានិតចិន និង Consejo Superior de Investigaciones Científicas។ បណ្ឌិត្យសភាវិទ្យាសាស្ត្រចិនត្រូវបានតំណាងដោយអ្នកនិពន្ធ Liao Xiaohan និង Li Jun; Han Wenting តំណាងឱ្យក្រសួងកសិកម្មនៃសាធារណៈរដ្ឋប្រជាមានិតចិន; និង Consejo Superior de Investigaciones Científicas ត្រូវបានតំណាងដោយ Lopez-Granados, ´ F. និង Pena, ˜ Jos´e María S. មកពីសហរដ្ឋអាមេរិក សាកលវិទ្យាល័យដូចជា Texas A&M University និង Purdue University ស្វែងរករបស់ពួកគេ
លើកឡើង។ សាកលវិទ្យាល័យដែលមានចំនួនបោះពុម្ពច្រើនជាងគេ និងទំនាក់ទំនងរបស់ពួកគេត្រូវបានបង្ហាញក្នុងរូបភាពទី 4។ លើសពីនេះ បញ្ជីនេះរួមមានស្ថាប័នដូចជា Consiglio Nazionale delle Ricerche និង Consejo Superior de Investigaciones Científicas ដែលសកម្មក្នុងការស្រាវជ្រាវវិទ្យាសាស្ត្រ ប៉ុន្តែមិនមែនជាស្ថាប័នសិក្សាទេ។ .
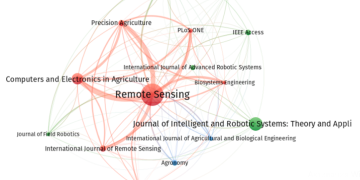
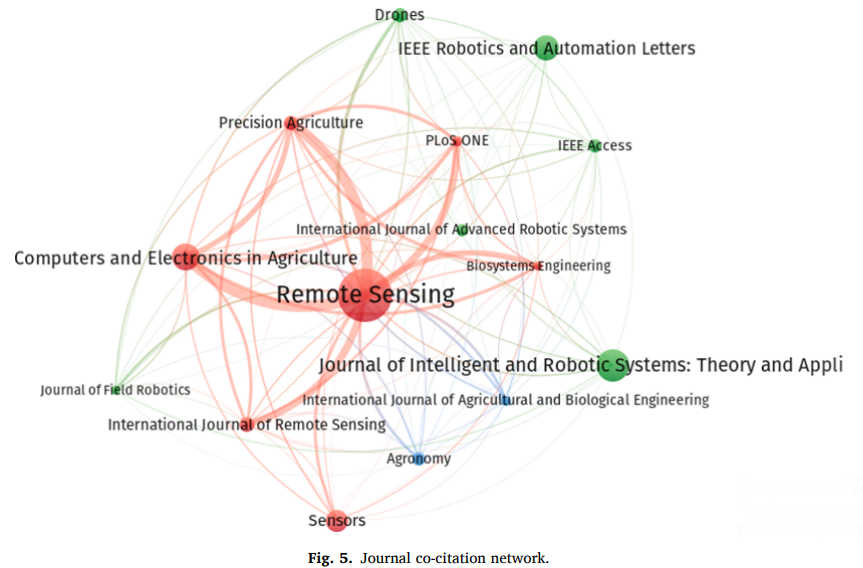
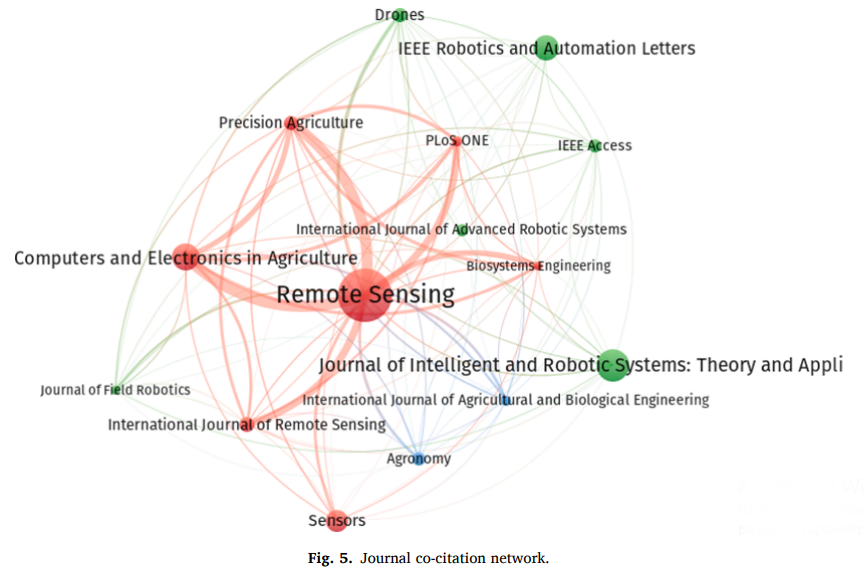
ការជ្រើសរើសរបស់យើងរួមមានទិនានុប្បវត្តិជាច្រើនប្រភេទ ដែលគ្របដណ្តប់ស្ទើរតែទាំងអស់នៃទិន្នន័យដែលមាន។ ដូចដែលបានបង្ហាញនៅក្នុងតារាងទី 8 ការយល់ឃើញពីចម្ងាយដែលមានអត្ថបទចំនួន 258 ជាប់ចំណាត់ថ្នាក់នៅកំពូល បន្ទាប់មកដោយ Journal of Intelligent and Robotic Systems: Theory and Applications ដែលមាន 126 និងកុំព្យូទ័រ និងអេឡិចត្រូនិចក្នុងវិស័យកសិកម្មដែលមាន 98 អត្ថបទ។ ខណៈពេលដែល Remote Sensing ភាគច្រើនផ្តោតទៅលើកម្មវិធី និងការអភិវឌ្ឍន៍យន្តហោះគ្មានមនុស្សបើក កុំព្យូទ័រ និងអេឡិចត្រូនិចក្នុងវិស័យកសិកម្ម គ្របដណ្តប់លើភាពជឿនលឿនផ្នែករឹងកុំព្យូទ័រ ផ្នែកទន់ អេឡិចត្រូនិច និងប្រព័ន្ធគ្រប់គ្រងក្នុងវិស័យកសិកម្ម។ ហាងលក់ទំនិញឆ្លងតំបន់ដូចជា IEEE Robotics និង Automation Letters ដែលមានការបោះពុម្ពចំនួន 87 និង IEEE Access ដែលមានការបោះពុម្ពចំនួន 34 ក៏ជាហាងឈានមុខគេនៅក្នុងវិស័យនេះផងដែរ។ ហាងកំពូលទាំងដប់ប្រាំបានរួមចំណែកដល់អក្សរសិល្ប៍ជាមួយនឹងឯកសារចំនួន 959 ដែលស្មើនឹង 20.40% នៃការបោះពុម្ពទាំងអស់។ ការវិភាគការដកស្រង់នៃទស្សនាវដ្តីអាចឱ្យយើងពិនិត្យមើលសារៈសំខាន់ និងភាពស្រដៀងគ្នារវាងការបោះពុម្ពផ្សាយ។ ការវិភាគរួមគ្នាផ្តល់លទ្ធផលនូវចង្កោមចំនួនបី ដូចបានបង្ហាញក្នុងរូបទី 5 ។ ចង្កោមក្រហមមាន ទិនានុប្បវត្តិដូចជា ការចាប់សញ្ញាពីចម្ងាយ កុំព្យូទ័រ និងអេឡិចត្រូនិកក្នុងវិស័យកសិកម្ម ឧបករណ៍ចាប់សញ្ញា។
និង International Journal of Remote Sensing ។ ហាងទាំងអស់នេះគឺជាទិនានុប្បវត្តិដែលមានកេរ្តិ៍ឈ្មោះខ្ពស់នៅក្នុងផ្នែកនៃការយល់ដឹងពីចម្ងាយ និងកសិកម្មច្បាស់លាស់។ ចង្កោមពណ៌បៃតងមានទិនានុប្បវត្តិដែលទាក់ទងនឹងមនុស្សយន្តដូចជា Journal of Intelligent and Robotic Systems: Theory and Applications, IEEE Robotics and Automation Letters, IEEE Access, និង Drones ។ ហាងទាំងនេះភាគច្រើនបោះផ្សាយឯកសារស្តីពីស្វ័យប្រវត្តិកម្ម ហើយមានប្រយោជន៍សម្រាប់វិស្វករកសិកម្ម។ ចង្កោមចុងក្រោយត្រូវបានបង្កើតឡើងដោយទិនានុប្បវត្តិទាក់ទងនឹងកសិកម្ម និងវិស្វកម្មកសិកម្ម ដូចជា Agronomy និង International Journal of Agricultural and Biological Engineering។
ទិនានុប្បវត្តិកំពូលទាំង 15 នៅក្នុងការស្រាវជ្រាវទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើក។
| ហ | ទិនានុប្បវត្តិ | រាប់ |
| 1 | អារម្មណ៍ពីចម្ងាយ | 258 |
| 2 | ទិនានុប្បវត្តិនៃប្រព័ន្ធឆ្លាតវៃនិងមនុស្សយន្ត: ទ្រឹស្តីនិង ការកម្មវិធី | 126 |
| 3 | កុំព្យូទ័រ និងអេឡិចត្រូនិចក្នុងវិស័យកសិកម្ម | 98 |
| 4 | អក្សរ IEEE មនុស្សយន្ត និងស្វ័យប្រវត្តិកម្ម | 87 |
| 5 | ឧបករណ៍ចាប់សញ្ញា | 73 |
| 6 | ទិនានុប្បវត្តិអន្តរជាតិនៃការយល់ដឹងពីចម្ងាយ | 42 |
| 7 | កសិកម្មជាក់លាក់ | 41 |
| 8 | ដាច់អយស្ម័យយាន | 40 |
| 9 | ក្សេត្រសាស្ត្រ | 34 |
| 10 | ការចូលប្រើ IEEE | 34 |
| 11 | ទិនានុប្បវត្តិអន្តរជាតិនៃប្រព័ន្ធមនុស្សយន្តកម្រិតខ្ពស់ | 31 |
| 12 | ទិនានុប្បវត្តិអន្តរជាតិនៃវិស្វកម្មកសិកម្មនិងជីវសាស្រ្ត | 25 |
| 13 | PLoS ONE | 25 |
| 14 | ទិនានុប្បវត្តិ Field Robotics | 23 |
| 15 | ជីវវិទ្យាវិស្វកម្ម | 23 |
សន្និដ្ឋាន
សេចក្តីសង្ខេប
នៅក្នុងការសិក្សានេះ យើងបានសង្ខេប និងវិភាគលើការស្រាវជ្រាវដែលមានស្រាប់លើយន្តហោះគ្មានមនុស្សបើកកសិកម្ម។ ដោយអនុវត្តបច្ចេកទេស bibliometric ផ្សេងៗ យើងបានខិតខំដើម្បីទទួលបានការយល់ដឹងកាន់តែប្រសើរឡើងអំពីរចនាសម្ព័ន្ធបញ្ញានៃការស្រាវជ្រាវដែលទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើក។ សរុបមក ការពិនិត្យឡើងវិញរបស់យើងផ្តល់នូវការរួមចំណែកជាច្រើនដោយកំណត់អត្តសញ្ញាណ និងពិភាក្សាអំពីពាក្យគន្លឹះនៅក្នុងអក្សរសិល្ប៍ បង្ហាញចង្កោមចំណេះដឹង ខណៈពេលដែលបង្កើតសហគមន៍ស្រដៀងគ្នាក្នុងវិស័យយន្តហោះគ្មានមនុស្សបើក គូសបញ្ជាក់ការស្រាវជ្រាវពីមុន និងណែនាំទិសដៅស្រាវជ្រាវនាពេលអនាគត។ ខាងក្រោមនេះ យើងបង្ហាញពីការរកឃើញចម្បងនៃការពិនិត្យឡើងវិញលើការអភិវឌ្ឍន៍យន្តហោះគ្មានមនុស្សបើកកសិកម្ម៖
• អក្សរសិល្ប៍ទាំងមូលបានរីកចម្រើនយ៉ាងឆាប់រហ័ស និងទាក់ទាញការចាប់អារម្មណ៍យ៉ាងសម្បើមក្នុងរយៈពេលមួយទសវត្សរ៍ចុងក្រោយនេះ ដូចដែលបានបង្ហាញដោយការកើនឡើងនៃចំនួនអត្ថបទក្រោយឆ្នាំ 2012។ ទោះបីជាវិស័យចំណេះដឹងនេះមិនទាន់ឈានដល់ភាពចាស់ទុំពេញលេញក៏ដោយ (Barrientos et al., 2011; Maes & Steppe, 2019) សំណួរជាច្រើននៅតែមិនទាន់មានចម្លើយ។ ជាឧទាហរណ៍ ឧបករណ៍ប្រើប្រាស់របស់យន្តហោះគ្មានមនុស្សបើកក្នុងការធ្វើកសិកម្មក្នុងផ្ទះនៅតែបើកចំហសម្រាប់ការពិភាក្សា (Aslan et al., 2022; Krul et al., 2021; Rold' an et al., 2015)។ ភាពស្មុគ្រស្មាញនៃទិដ្ឋភាពវាល និងស្ថានភាពរូបភាពផ្សេងៗគ្នា (ឧ. ស្រមោល និងការបំភ្លឺ) អាចបណ្តាលឱ្យមានភាពខុសគ្នាក្នុងថ្នាក់ខ្ពស់ជាងមុន (Yao et al., 2019)។ សូម្បីតែនៅក្នុងដំណាក់កាលស្រាវជ្រាវក្រោយៗក៏ដោយ អ្នកស្រាវជ្រាវត្រូវបានជំទាស់ដើម្បីកំណត់ផែនការហោះហើរដ៏ល្អប្រសើរដោយយោងទៅតាមសេណារីយ៉ូជាក់លាក់ និងគុណភាពរូបភាពដែលត្រូវការ (Soares et al., 2021; Tu et al.,
2020) ។
• យើងសង្កេតឃើញថា វិស័យនេះបានរីកចម្រើនពីការអភិវឌ្ឍន៍ប្រព័ន្ធ UAV ប្រកបដោយប្រសិទ្ធភាព ដល់ការបញ្ចូលបច្ចេកទេស AI ដូចជាការរៀនម៉ាស៊ីន និងការរៀនស៊ីជម្រៅក្នុងការរចនាយន្តហោះគ្មានមនុស្សបើកកសិកម្ម (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020)។
• ការស្រាវជ្រាវលើយន្តហោះគ្មានមនុស្សបើកកសិកម្មភាគច្រើនបានពិភាក្សាអំពីការចាប់សញ្ញាពីចម្ងាយដោយការស្វែងរកសក្តានុពលនៃបច្ចេកវិទ្យាក្នុងការត្រួតពិនិត្យបរិស្ថាន ការគ្រប់គ្រងដំណាំ និងការគ្រប់គ្រងស្មៅ (ចង្កោមទី 1) ក៏ដូចជាការវាយតម្លៃពីចម្ងាយ និងការប៉ាន់ប្រមាណទិន្នផល (ចង្កោមទី 2) ។ សំណុំនៃការសិក្សាដ៏មានឥទ្ធិពលលើយន្តហោះគ្មានមនុស្សបើកកសិកម្មរួមមាន Austin (2010), Berni et al ។ (2009)a, Herwitz et al ។ (2004), Nex និង Remondino (2014) និង Zhang and Kovacs (2012)។ ការសិក្សាទាំងនេះបានបង្កើតមូលដ្ឋានគំនិតនៃការស្រាវជ្រាវទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើកនៅក្នុងបរិបទនៃកសិកម្ម។
• ទាក់ទងទៅនឹងវិធីសាស្រ្ត យើងបានសង្កេតឃើញថា ការស្រាវជ្រាវភាគច្រើនដែលបានធ្វើរហូតមកដល់ពេលនេះ មានទាំងការរចនាប្រព័ន្ធ គំនិត ឬការសិក្សាផ្អែកលើការពិនិត្យឡើងវិញ (Inoue, 2020; Nex & Remondino, 2014; P'erez-Ortiz et al ។ , 2015; Yao et al., 2019). យើងក៏កត់សម្គាល់ផងដែរអំពីកង្វះវិធីសាស្រ្តជាក់ស្តែង គុណភាព និងករណីសិក្សានៅកន្លែងធ្វើការក្នុងការស៊ើបអង្កេតយន្តហោះគ្មានមនុស្សបើកកសិកម្ម។
• ថ្មីៗនេះ ប្រធានបទទាក់ទងនឹងកសិកម្មច្បាស់លាស់ បច្ចេកទេស AI ភាពជាក់លាក់ viticulture និងការវាយតម្លៃភាពតានតឹងក្នុងទឹកបានទាក់ទាញចំណាប់អារម្មណ៍យ៉ាងខ្លាំង (Espinoza et al., 2017; Gomez-Cand ´on ´ et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021)។ ការពិនិត្យដោយប្រុងប្រយ័ត្ននៃក្រុមស្រាវជ្រាវនៅក្នុងយុគសម័យពីរដាច់ដោយឡែកពីគ្នាគឺ 1990-2010 និង 2011-2021 បង្ហាញពីវឌ្ឍនភាពនៃរចនាសម្ព័ន្ធបញ្ញារបស់ដែន។ រយៈពេលពីឆ្នាំ 1990 ដល់ឆ្នាំ 2010 បានបង្កើតការបង្កើតឡើងនូវគោលគំនិតកណ្តាល និងគោលគំនិតរបស់យន្តហោះគ្មានមនុស្សបើក ដែលជាក់ស្តែងបានមកពីការពិភាក្សាអំពីការរចនា ការអភិវឌ្ឍន៍ និងការអនុវត្តរបស់ UAV ។ នៅយុគទីពីរ ការស្រាវជ្រាវផ្តោតទៅលើការសិក្សាពីមុន ដោយខិតខំប្រឹងប្រែងក្នុងការសំយោគករណីប្រើប្រាស់ UAV ក្នុងវិស័យកសិកម្ម។ យើងក៏បានរកឃើញការសិក្សាជាច្រើនដែលពិភាក្សាអំពីការប្រើយន្តហោះគ្មានមនុស្សបើកក្នុងការងារថតរូប និងកសិកម្មភាពជាក់លាក់។
| ហ | ទិនានុប្បវត្តិ | រាប់ |
| 1 | អារម្មណ៍ពីចម្ងាយ | 258 |
| 2 | ទិនានុប្បវត្តិនៃប្រព័ន្ធឆ្លាតវៃនិងមនុស្សយន្ត: ទ្រឹស្តីនិង | 126 |
| ការកម្មវិធី | ||
| 3 | កុំព្យូទ័រ និងអេឡិចត្រូនិចក្នុងវិស័យកសិកម្ម | 98 |
| 4 | អក្សរ IEEE មនុស្សយន្ត និងស្វ័យប្រវត្តិកម្ម | 87 |
| 5 | ឧបករណ៍ចាប់សញ្ញា | 73 |
| 6 | ទិនានុប្បវត្តិអន្តរជាតិនៃការយល់ដឹងពីចម្ងាយ | 42 |
| 7 | កសិកម្មជាក់លាក់ | 41 |
| 8 | ដាច់អយស្ម័យយាន | 40 |
| 9 | ក្សេត្រសាស្ត្រ | 34 |
| 10 | ការចូលប្រើ IEEE | 34 |
| 11 | ទិនានុប្បវត្តិអន្តរជាតិនៃប្រព័ន្ធមនុស្សយន្តកម្រិតខ្ពស់ | 31 |
| 12 | ទិនានុប្បវត្តិអន្តរជាតិនៃវិស្វកម្មកសិកម្មនិងជីវសាស្រ្ត | 25 |
| 13 | PLoS ONE | 25 |
| 14 | ទិនានុប្បវត្តិ Field Robotics | 23 |
| 15 | ជីវវិទ្យាវិស្វកម្ម | 22 |
ផលប៉ះពាល់
ការពិនិត្យ Bibliometric របស់យើងត្រូវបានរចនាឡើង និងធ្វើឡើងជាមួយអ្នកប្រាជ្ញ កសិករ អ្នកជំនាញកសិកម្ម អ្នកប្រឹក្សាដំណាំ និងអ្នករចនាប្រព័ន្ធ UAV ក្នុងចិត្ត។ ចំពោះចំណេះដឹងដ៏ល្អបំផុតរបស់អ្នកនិពន្ធ នេះគឺជាការវាយតម្លៃដើមដំបូងបង្អស់មួយ ដែលបានធ្វើការវិភាគគន្ថនិទ្ទេសស៊ីជម្រៅនៃ
កម្មវិធី Drone ក្នុងវិស័យកសិកម្ម។ យើងបានធ្វើការពិនិត្យឡើងវិញយ៉ាងទូលំទូលាយនៃស្ថាប័នចំណេះដឹងនេះ ដោយប្រើប្រាស់ការវិភាគការដកស្រង់ និងការដកស្រង់រួមគ្នានៃការបោះពុម្ពផ្សាយ។ ការប៉ុនប៉ងរបស់យើងដើម្បីពិពណ៌នាអំពីរចនាសម្ព័ន្ធបញ្ញានៃការស្រាវជ្រាវយន្តហោះគ្មានមនុស្សបើកក៏ផ្តល់នូវការយល់ដឹងថ្មីសម្រាប់អ្នកសិក្សាផងដែរ។ ការពិនិត្យឡើងវិញយ៉ាងប្រុងប្រយ័ត្ននៃពាក្យគន្លឹះដែលប្រើយូរៗម្តងបង្ហាញពីចំណុចក្តៅ និងតំបន់ស្រាវជ្រាវផ្តោតនៅក្នុងអក្សរសិល្ប៍ដែលទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើក។ លើសពីនេះ យើងបង្ហាញបញ្ជីនៃការសិក្សាដែលបានលើកឡើងច្រើនបំផុតដើម្បីកំណត់អត្តសញ្ញាណការងារស្រាវជ្រាវដែលមានឥទ្ធិពលបំផុតដែលបានបញ្ចប់ក្នុងវិស័យនេះ។ ការកំណត់អត្តសញ្ញាណអត្ថបទ និងពាក្យគន្លឹះ អាចផ្តល់នូវចំណុចចាប់ផ្តើមដ៏រឹងមាំមួយ ដើម្បីស្វែងរកផ្លូវជាច្រើនសម្រាប់ការសិក្សានាពេលអនាគត។
សំខាន់ យើងបានបង្ហាញចង្កោមដែលចាត់ថ្នាក់ការងារដែលអាចប្រៀបធៀបបាន និងលម្អិតអំពីលទ្ធផល។ ការសិក្សាដែលត្រូវបានចាត់ថ្នាក់ជាក្រុមជួយក្នុងការយល់ដឹងអំពីរចនាសម្ព័ន្ធបញ្ញានៃការស្រាវជ្រាវ UAV ។ គួរកត់សម្គាល់ថា យើងបានរកឃើញនូវកង្វះខាតនៃការសិក្សាដែលស៊ើបអង្កេតលើកត្តានៃការទទួលយកយន្តហោះគ្មានមនុស្សបើក
និងឧបសគ្គក្នុងសកម្មភាពកសិកម្ម (សូមមើលតារាងទី 9)។ អ្នកស្រាវជ្រាវនាពេលអនាគតអាចដោះស្រាយគម្លាតសក្តានុពលនេះដោយធ្វើការស៊ើបអង្កេតជាក់ស្តែងដែលវាយតម្លៃកត្តានៃការទទួលយករបស់យន្តហោះគ្មានមនុស្សបើកនៅក្នុងសកម្មភាពកសិកម្មផ្សេងៗគ្នា និងលក្ខខណ្ឌអាកាសធាតុ។ លើសពីនេះ ការស្រាវជ្រាវផ្អែកលើករណីសិក្សាទាក់ទងនឹងប្រសិទ្ធភាពនៃយន្តហោះគ្មានមនុស្សបើក គួរតែត្រូវបានគាំទ្រជាមួយនឹងទិន្នន័យពិតពីវិស័យនេះ។ ដូចគ្នានេះផងដែរ ការចូលរួមរបស់កសិករ និងអ្នកគ្រប់គ្រងក្នុងការស្រាវជ្រាវសិក្សា នឹងមានអត្ថប្រយោជន៍សម្រាប់ទាំងទ្រឹស្តី និងការអនុវត្តជាក់ស្តែងនៃការស្រាវជ្រាវលើយន្តហោះគ្មានមនុស្សបើក។ យើងក៏អាចកំណត់អត្តសញ្ញាណអ្នកស្រាវជ្រាវលេចធ្លោបំផុត និងការរួមចំណែករបស់ពួកគេផងដែរ ដែលមានតម្លៃ ពីព្រោះការយល់ដឹងអំពីការងារសិក្ខាសាលាថ្មីៗអាចផ្តល់នូវការណែនាំមួយចំនួនសម្រាប់ការខិតខំសិក្សានាពេលអនាគត។
តារាង 9
ឧបសគ្គក្នុងការទទួលយក UAV ។
| ឧបសគ្គ | ការពិពណ៌នា |
| សុវត្ថិភាពទិន្នន័យ | សន្តិសុខតាមអ៊ីនធឺណិតគឺជាបញ្ហាប្រឈមដ៏សំខាន់សម្រាប់ការអនុវត្ត ដំណោះស្រាយ IoT (Masroor et al., 2021) ។ |
| អន្តរប្រតិបត្តិការ និង ការធ្វើសមាហរណកម្ម | បច្ចេកវិទ្យាផ្សេងៗដូចជា UAV, WSN, IoT ជាដើម។ គួរតែត្រូវបានរួមបញ្ចូលនិងបញ្ជូនទិន្នន័យដែល បង្កើនកម្រិតភាពស្មុគស្មាញ (Alsamhi et al ។ , 2021; Popescu et al ។ , 2020; Vuran et al., 2018)។ |
| ការចំណាយលើការអនុវត្ត | នេះជាករណីពិសេសសម្រាប់កសិករខ្នាតតូច និងសម្រាប់ ការរួមបញ្ចូលនូវបច្ចេកវិទ្យាទំនើបៗជាច្រើន ( Masroor et al ។ , 2021) ។ |
| ចំណេះដឹងការងារ និង ជំនាញ | អ្នកបើកយន្តហោះគ្មានមនុស្សបើកដែលមានជំនាញគឺត្រូវការដើម្បីដំណើរការ UAVs ។ ផងដែរ ការអនុវត្តទំនើបកម្មផ្សេងៗ បច្ចេកវិជ្ជាត្រូវការកម្មករជំនាញ (YB Huang et al ។ , 2013; Tsouros et al ។ , 2019) ។ |
| ថាមពលម៉ាស៊ីន និងការហោះហើរ រយៈពេល។ | យន្តហោះគ្មានមនុស្សបើកមិនអាចដំណើរការបានច្រើនម៉ោង និងគ្របដណ្តប់ តំបន់ធំ (Hardin & Hardin, 2010; Laliberte et al ។ , 2007) ។ |
| ស្ថេរភាព ភាពជឿជាក់ និង ភាពបត់បែន | យន្តហោះគ្មានមនុស្សបើកមិនមានស្ថេរភាពក្នុងអំឡុងពេលអាកាសធាតុអាក្រក់ (Hardin & Hardin, 2010; Laliberte et al., 2007)។ |
| ដែនកំណត់បន្ទុកនិង គុណភាពឧបករណ៍ចាប់សញ្ញា | យន្តហោះគ្មានមនុស្សបើកអាចផ្ទុកបន្ទុកមានកំណត់នាំទៅដល់ សមត្ថភាពផ្ទុកឧបករណ៍ចាប់សញ្ញាគុណភាពទាប (Nebiker et al ។ , 2008) ។ |
| បទប្បញ្ញត្តិ | ដោយសារតែយន្តហោះគ្មានមនុស្សបើកអាចមានគ្រោះថ្នាក់ផងដែរ មានសភាពធ្ងន់ធ្ងរ បទប្បញ្ញត្តិនៅក្នុងតំបន់មួយចំនួន (Hardin & Jensen, 2011; Laliberte & Rango, 2011) ។ |
| ចំណេះដឹងរបស់កសិករ និង អត្រាការប្រាក់ | ដូចបច្ចេកវិទ្យាទំនើបផ្សេងទៀត យន្តហោះគ្មានមនុស្សបើក ការអនុវត្តជោគជ័យ ត្រូវការជំនាញ និងផងដែរ។ អមដោយភាពមិនច្បាស់លាស់ (Fisher et al., 2009; Lambert et al ។ , 2004; Stafford, 2000) ។ |
ដោយសារមានតម្រូវការជាប្រចាំក្នុងការប្រើប្រាស់ធនធានដែលមានប្រកបដោយប្រសិទ្ធភាព ដើម្បីបង្កើនទិន្នផល កសិករអាចទាញយកអត្ថប្រយោជន៍ពីយន្តហោះគ្មានមនុស្សបើក ដើម្បីធានាបាននូវការស្កេនយ៉ាងរហ័ស ត្រឹមត្រូវ និងសន្សំសំចៃលើវាលស្រែរបស់ពួកគេ។ បច្ចេកវិទ្យានេះអាចជួយកសិករក្នុងការកំណត់ស្ថានភាពដំណាំរបស់ពួកគេ និងវាយតម្លៃស្ថានភាពទឹក ដំណាក់កាលនៃការទុំ ការបំផ្លាញសត្វល្អិត និងតម្រូវការអាហារូបត្ថម្ភ។ សមត្ថភាពចាប់សញ្ញាពីចម្ងាយរបស់យន្តហោះគ្មានមនុស្សបើកអាចផ្តល់ឱ្យកសិករនូវទិន្នន័យសំខាន់ៗ ដើម្បីប្រមើលមើលបញ្ហានៅដំណាក់កាលដំបូង និងធ្វើអន្តរាគមន៍សមស្របភ្លាមៗ។ ទោះជាយ៉ាងណាក៏ដោយ អត្ថប្រយោជន៍នៃបច្ចេកវិទ្យាអាចដឹងបានលុះត្រាតែបញ្ហាប្រឈមត្រូវបានដោះស្រាយយ៉ាងត្រឹមត្រូវ។ នៅក្នុងពន្លឺនៃ
បញ្ហាបច្ចុប្បន្នទាក់ទងនឹងសុវត្ថិភាពទិន្នន័យ បញ្ហាបច្ចេកវិទ្យាឧបករណ៍ចាប់សញ្ញា (ឧទាហរណ៍ ភាពជឿជាក់ ឬភាពត្រឹមត្រូវនៃការវាស់វែង) ភាពស្មុគស្មាញនៃការរួមបញ្ចូល និងការចំណាយលើការអនុវត្តយ៉ាងច្រើន ការសិក្សានាពេលអនាគតក៏ត្រូវតែពិនិត្យមើលលទ្ធភាពបច្ចេកទេស សេដ្ឋកិច្ច និងប្រតិបត្តិការនៃការរួមបញ្ចូលយន្តហោះគ្មានមនុស្សបើកកសិកម្ម និងការកាត់ផ្សេងៗទៀត។ បច្ចេកវិទ្យាគែម។
ដែនកំណត់
ការសិក្សារបស់យើងមានដែនកំណត់មួយចំនួន។ ទីមួយ ការរកឃើញត្រូវបានកំណត់ដោយការបោះពុម្ពដែលបានជ្រើសរើសសម្រាប់ការវិភាគចុងក្រោយ។ វាមានការលំបាកក្នុងការចាប់យកការសិក្សាដែលពាក់ព័ន្ធទាំងអស់ដែលទាក់ទងនឹងយន្តហោះគ្មានមនុស្សបើកកសិកម្ម ជាពិសេសអ្នកដែលមិនត្រូវបានធ្វើលិបិក្រមនៅក្នុងមូលដ្ឋានទិន្នន័យ Scopus ។ លើសពីនេះ ដំណើរការប្រមូលទិន្នន័យត្រូវបានកំណត់ចំពោះការកំណត់នៃពាក្យគន្លឹះស្វែងរក ដែលប្រហែលជាមិនរួមបញ្ចូល និងនាំទៅរកការរកឃើញដែលមិនអាចសន្និដ្ឋានបាន។ ដូច្នេះ ការសិក្សានាពេលអនាគតត្រូវយកចិត្តទុកដាក់បន្ថែមទៀតលើបញ្ហាមូលដ្ឋាននៃការប្រមូលទិន្នន័យដើម្បីធ្វើ
ការសន្និដ្ឋានដែលអាចទុកចិត្តបានជាង។ ដែនកំណត់មួយទៀតទាក់ទងនឹងការបោះពុម្ពថ្មីជាមួយនឹងចំនួននៃការដកស្រង់ទាប។ ការវិភាគគន្ថនិទ្ទេសមានភាពលំអៀងទៅនឹងការបោះពុម្ពផ្សាយមុននេះ ដោយសារពួកគេមានទំនោរទទួលបានការដកស្រង់បន្ថែមទៀតក្នុងរយៈពេលជាច្រើនឆ្នាំ។ ការសិក្សាថ្មីៗត្រូវការពេលវេលាជាក់លាក់មួយ ដើម្បីទាក់ទាញការចាប់អារម្មណ៍ និងប្រមូលការដកស្រង់។ ដូច្នេះហើយ ការសិក្សាថ្មីៗដែលនាំមកនូវការផ្លាស់ប្តូរគំរូនឹងមិនជាប់ចំណាត់ថ្នាក់ក្នុងការងារដែលមានឥទ្ធិពលទាំងដប់នោះទេ។ ការកំណត់នេះគឺមានជាទូទៅក្នុងការពិនិត្យលើដែនស្រាវជ្រាវដែលកំពុងរីកចម្រើនយ៉ាងឆាប់រហ័ស ដូចជាយន្តហោះគ្មានមនុស្សបើកកសិកម្ម។ ដូចដែលយើងបានពិគ្រោះជាមួយ Scopus ដើម្បីសិក្សាអក្សរសិល្ប៍សម្រាប់ការងារនេះ អ្នកស្រាវជ្រាវនាពេលអនាគតអាចពិចារណាខុសគ្នា
មូលដ្ឋានទិន្នន័យដូចជា Web of Science និង IEEE Xplore ដើម្បីពង្រីកការយល់ដឹង និងពង្រឹងរចនាសម្ព័ន្ធស្រាវជ្រាវ។
ការសិក្សាគន្ថនិទ្ទេសដែលមានសក្តានុពលអាចពិចារណាប្រភពចំណេះដឹងសំខាន់ៗផ្សេងទៀតដូចជា ឯកសារសន្និសីទ ជំពូក និងសៀវភៅដើម្បីបង្កើតការយល់ដឹងប្រលោមលោក។ ទោះបីជាការគូសផែនទី និងការស៊ើបអង្កេតការបោះពុម្ពផ្សាយជាសកលលើយន្តហោះគ្មានមនុស្សបើកកសិកម្មក៏ដោយ ការរកឃើញរបស់យើងមិនបានបង្ហាញពីមូលហេតុនៅពីក្រោយលទ្ធផលសិក្សារបស់សាកលវិទ្យាល័យនោះទេ។ នេះត្រួសត្រាយផ្លូវទៅកាន់ផ្នែកថ្មីនៃការស្រាវជ្រាវក្នុងការពន្យល់ប្រកបដោយគុណភាពថាហេតុអ្វីបានជាសាកលវិទ្យាល័យមួយចំនួនមានផលិតភាពជាងកន្លែងផ្សេងទៀតនៅពេលនិយាយអំពីការស្រាវជ្រាវអំពីកសិកម្ម។
យន្តហោះគ្មានមនុស្សបើក។ លើសពីនេះទៀត ការសិក្សានាពេលអនាគតអាចផ្តល់នូវការយល់ដឹងអំពីសក្តានុពលនៃយន្តហោះគ្មានមនុស្សបើក ដើម្បីបង្កើននិរន្តរភាពកសិកម្មតាមវិធីជាច្រើនដូចជា ការត្រួតពិនិត្យបរិស្ថាន ការគ្រប់គ្រងដំណាំ និងការគូសផែនទីស្មៅ ដូចដែលបានបង្ហាញដោយអ្នកស្រាវជ្រាវជាច្រើន (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b)។ ដោយសារការវិភាគអត្ថបទមិនអាចធ្វើទៅរួច ដោយសារចំនួនឯកសារដែលបានជ្រើសរើសច្រើន ចាំបាច់ត្រូវមានការពិនិត្យអក្សរសិល្ប៍ជាប្រព័ន្ធដែលពិនិត្យ
វិធីសាស្រ្តស្រាវជ្រាវដែលបានប្រើ និងការចូលរួមរបស់កសិករក្នុងការសិក្សាមុន។ សរុបមក ការវិភាគរបស់យើងអំពីការស្រាវជ្រាវលើយន្តហោះគ្មានមនុស្សបើកបង្ហាញពីទំនាក់ទំនងដែលមើលមិនឃើញនៃស្ថាប័នចំណេះដឹងនេះ។ ដូច្នេះការពិនិត្យឡើងវិញនេះជួយបង្ហាញទំនាក់ទំនងក្នុងចំណោមការបោះពុម្ពផ្សាយ និងស្វែងយល់ពីរចនាសម្ព័ន្ធបញ្ញានៃផ្នែកស្រាវជ្រាវ។ វាក៏ពណ៌នាអំពីទំនាក់ទំនងរវាងទិដ្ឋភាពផ្សេងៗនៃអក្សរសិល្ប៍ ដូចជាពាក្យគន្លឹះ ទំនាក់ទំនង និងប្រទេសរបស់អ្នកនិពន្ធ។
ការប្រកាសអំពីចំណាប់អារម្មណ៍ប្រកួតប្រជែង
អ្នកនិពន្ធប្រកាសថាពួកគេមិនស្គាល់ផលប្រយោជន៍ហិរញ្ញវត្ថុប្រកួតប្រជែងឬទំនាក់ទំនងផ្ទាល់ខ្លួនទេដែលអាចមានឥទ្ធិពលលើការងារដែលបានរាយការណ៍នៅក្នុងក្រដាសនេះ។
ឧបសម្ព័ន្ធទី 1
TITLE-ABS-KEY (((យន្តហោះគ្មានមនុស្សបើក* OR "យន្តហោះគ្មានមនុស្សបើក" ឬ uav* ឬ "ប្រព័ន្ធយន្តហោះគ្មានមនុស្សបើក“ ឬដែល OR "យន្តហោះដែលសាកល្បងពីចម្ងាយ”) និង (កសិកម្ម ឬ កសិកម្ម ឬ កសិកម្ម ឬ កសិករ))) និង (មិនរាប់បញ្ចូល (PUBYEAR, 2022))) និង (កំណត់ចំពោះ (ភាសា "ភាសាអង់គ្លេស"))។
ឯកសារយោង
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. ការបង្កើតព័ត៌មាន 3D hyperspectral ជាមួយនឹងកាមេរ៉ាថត UAV ទម្ងន់ស្រាលសម្រាប់ការត្រួតពិនិត្យបន្លែ៖ ពី
ការក្រិតតាមខ្នាតកាមេរ៉ាទៅនឹងការធានាគុណភាព។ ISPRS J. Photogramm ។ វិញ្ញាណពីចម្ងាយ ១០៨, ២៤៥–២៥៩។ https://doi.org/108/j.isprsjprs.245 ។
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. ការអភិវឌ្ឍន៍នៃក្បួនដោះស្រាយការទទួលស្គាល់លំនាំសម្រាប់ការរកឃើញសត្វស្លាបដោយស្វ័យប្រវត្តិពីរូបភាពយានអវកាសគ្មានមនុស្សបើក។
ការស្ទង់មតិ។ ដំណឹងអំពីដី។ វិទ្យាសាស្ត្រ។ ៦៥ (១), ៣៧–៤៥។
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021. បណ្តាញឧបករណ៍ចាប់សញ្ញាឥតខ្សែក្នុងវិស័យកសិកម្ម៖ ការយល់ដឹងពីការវិភាគ bibliometric ។ និរន្តរភាព ១៣ (13),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., ការវាយតម្លៃនៃវិធីសាស្រ្តផ្សេងៗសម្រាប់ការរកឃើញស្រមោលនៅក្នុងរូបភាពអុបទិកដែលមានគុណភាពបង្ហាញខ្ពស់ និងការវាយតម្លៃផលប៉ះពាល់នៃស្រមោលលើការគណនា នៃ NDVI និង evapotranspiration ។ ធារាសាស្ត្រ។ វិទ្យាសាស្ត្រ។ ៣៧ (៣), ៤០៧–៤២៩។ https://doi.org/37/s3-407-429-10.1007 ។
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. រូបភាព Hyperspectral: ការពិនិត្យឡើងវិញលើឧបករណ៍ចាប់សញ្ញា UAV ដែលមានមូលដ្ឋានលើទិន្នន័យ ដំណើរការនិង
កម្មវិធីសម្រាប់កសិកម្ម និងព្រៃឈើ។ ការយល់ឃើញពីចម្ងាយ ៩ (១១). https://doi.org/ 9/rs11 ។
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. រូបភាពពហុបណ្ដោះអាសន្នដោយប្រើយានអវកាសគ្មានមនុស្សបើកសម្រាប់ត្រួតពិនិត្យដំណាំផ្កាឈូករ័ត្ន។ ជីវសាស្ត្រ។ អេង.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. ការបង្កើតគំរូកម្ពស់ឌីជីថលត្រឹមត្រូវពី UAV ទទួលបានរូបភាពត្រួតស៊ីគ្នាភាគរយទាប។ Int.
J. Remote Sens. 38 (8–10), 3113–3134។ https://doi.org/10.1080/ 01431161.2017.1285085 ។
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. ការពិនិត្យឡើងវិញនៃវិធីសាស្រ្តរៀនម៉ាស៊ីនសម្រាប់ជីវម៉ាស និងការទាញយកសំណើមដីពីទិន្នន័យពីចម្ងាយ។ ការចាប់អារម្មណ៍ពីចម្ងាយ 7 (12), 16398–16421 ។
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., អ៊ីនធឺណេតពណ៌បៃតងនៃរបស់ដែលប្រើ UAVs នៅក្នុងបណ្តាញ B5G: ការពិនិត្យឡើងវិញនៃកម្មវិធី
និងយុទ្ធសាស្ត្រ។ ការផ្សាយពាណិជ្ជកម្ម។ ហុក។ Netw ។ 117, 102505 https://doi.org/10.1016/j. អាដហុក.២០២១.១០២៥០៥.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. Drones សម្រាប់ការត្រួតពិនិត្យបសុសត្វចៀម។ នៅក្នុង: សន្និសីទ IEEE មេឌីទែរ៉ាណេលើកទី 20 ។ https://doi ។
org/10.1109/MELECON48756.2020.9140588។
Ampatzidis, Y., Partel, V., 2019. ការវាយអក្សរខ្ពស់ដែលមានមូលដ្ឋានលើ UAV នៅក្នុងក្រូចឆ្មា ដោយប្រើប្រាស់រូបភាពពហុវិស័យ និងបញ្ញាសិប្បនិម្មិត។ ការយល់ឃើញពីចម្ងាយ ១១ (៤), https://doi.org/11/rs4.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: កម្មវិធីដែលមានមូលដ្ឋានលើពពក ដើម្បីដំណើរការ វិភាគ និងមើលឃើញទិន្នន័យដែលប្រមូលបានដោយ UAV សម្រាប់កម្មវិធីកសិកម្មច្បាស់លាស់ ដោយប្រើប្រាស់បញ្ញាសិប្បនិម្មិត។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៧៤, ១០៥៤៥៧ https://doi. org/174/j.compag.105457 ។
Ang, K.-L.-M., Seng, JKP, 2021. Big data and machine learning with hyperspectral information in Agriculture. IEEE Access 9, 36699–36718។ https://doi.org/10.1109/
ACCESS.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. ពិនិត្យឡើងវិញ៖ បច្ចេកវិជ្ជាចិញ្ចឹមសត្វប្រកបដោយភាពជាក់លាក់នៅក្នុងប្រព័ន្ធបសុសត្វដែលមានមូលដ្ឋានលើវាលស្មៅ។ សត្វ ១៦ (១), https://doi.org/16/j.animal.1.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., និន្នាការលើបច្ចេកវិទ្យាព័ត៌មាន និងទំនាក់ទំនងកម្រិតខ្ពស់សម្រាប់
ការកែលម្អផលិតភាពកសិកម្ម៖ ការវិភាគជីវមាត្រ។ Agronomy 10 (12), ប្រការ 12. https://doi.org/10.3390/agronomy10121989 ។
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011. The flying gator: to aerial robotics in occam-π. កុម្មុយនិស្ត។ ស្ថាបត្យករដំណើរការ។ ឆ្នាំ ២០១១, ៣២៩–៣៤០។ https://doi ។ org/2011/329-340-10.3233-978-1-60750 ។
Arora, SD, Chakraborty, A., 2021. រចនាសម្ព័ន្ធបញ្ញានៃអាកប្បកិរិយាត្អូញត្អែររបស់អតិថិជន (CCB) ការស្រាវជ្រាវ៖ ការវិភាគព្រះគម្ពីរ។ J. Business Res. ១២២, ៦០–៧៤។
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022។
ការស្ទង់មតិដ៏ទូលំទូលាយនៃការសិក្សាថ្មីៗជាមួយ UAV សម្រាប់កសិកម្មច្បាស់លាស់នៅក្នុងវាលបើកចំហ និងផ្ទះកញ្ចក់។ អេបផល វិទ្យាសាស្ត្រ។ ១២ (៣), ១០៤៧. https://doi.org/12/
កម្មវិធី 12031047 ។
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018) ។ Field Phenotyping សម្រាប់អនាគត។ នៅក្នុងការពិនិត្យរុក្ខជាតិប្រចាំឆ្នាំតាមអ៊ីនធឺណិត (ទំព័រ 719–736)។ ចន
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
Austin, R., 2010. ប្រព័ន្ធយន្តហោះគ្មានមនុស្សបើក៖ ការរចនា UAVS ការអភិវឌ្ឍន៍ និងការដាក់ពង្រាយ។ នៅក្នុង៖ ប្រព័ន្ធយន្តហោះគ្មានមនុស្សបើក៖ ការរចនា UAVS ការអភិវឌ្ឍន៍ និង
ការដាក់ពង្រាយ។ John Wiley និងកូនប្រុស។ https://doi.org/10.1002/9780470664797 ។
Awais, M., Li, W., Cheema, MJM, Zaman, QU, Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, AA, Afzal, MM, Liu, C., 2022. ការចាប់សញ្ញាពីចម្ងាយដែលមានមូលដ្ឋានលើ UAV នៅក្នុងភាពតានតឹងរុក្ខជាតិ ស្រមៃដោយប្រើឧបករណ៍ចាប់សញ្ញាកម្ដៅដែលមានគុណភាពបង្ហាញខ្ពស់សម្រាប់ការអនុវត្តកសិកម្មឌីជីថល៖ ការពិនិត្យមេតា។ Int. J. បរិស្ថាន។ វិទ្យាសាស្ត្រ។ បច្ចេកទេស។ https://doi ។
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. Smart farming: ឱកាស, បញ្ហាប្រឈម
និងអ្នកបង្កើតបច្ចេកវិទ្យា។ 2018 IoT Vertical និង។ កិច្ចប្រជុំកំពូលប្រធានបទស្តីពីកសិកម្ម -Tuscany (IOT Tuscany) 1–6 ។ https://doi.org/10.1109/IOTTUSCANY.2018.8373043 ។
Bah, MD, Hafiane, A., Canals, R., 2018. ការរៀនស៊ីជម្រៅជាមួយនឹងការដាក់ស្លាកទិន្នន័យដែលគ្មានការត្រួតពិនិត្យសម្រាប់ការរកឃើញស្មៅនៅក្នុងដំណាំជាជួរនៅក្នុងរូបភាព UAV ។ ការចាប់អារម្មណ៍ពីចម្ងាយ 10 (11), 1690 ។
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. Normative vs social constructivist processes in the allocation of quotes: a network-analytic model. អឹម. សង្គម។ បប ៦៣ (៦), ៨២៩–៨៤៦។ https://doi ។
org/10.2307/2657504 ។
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. ការវាយតម្លៃភាពប្រែប្រួលនៃស្ថានភាពទឹកចំការដោយកំដៅ និងពហុវិសាលភាព
រូបភាពដោយប្រើយានអវកាសគ្មានមនុស្សបើក (UAV) ។ ធារាសាស្ត្រ។ វិទ្យាសាស្ត្រ។ ៣០ (៦), ៥១១–៥២២។ https://doi.org/30/s6-511-522-10.1007 ។
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L., ការបង្កាត់ពូជជំនាន់ក្រោយ។ វិទ្យាសាស្ត្ររុក្ខជាតិ។ ២៤២, ៣–១៣។ https://doi.org/242/j.
plantci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. ទស្សនវិស័យលើការប្រើប្រាស់ប្រព័ន្ធអាកាសគ្មានមនុស្សបើក ដើម្បីតាមដានគោក្របី។ Outlook កសិកម្ម។ ៤៧ (៣), ២១៤–២២២។ https://doi.org/47/3 ។
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. Low-weight and UAV-based hyperspectral កាមេរ៉ាពេញស៊ុម
សម្រាប់ការត្រួតពិនិត្យដំណាំ៖ ការប្រៀបធៀប Spectral ជាមួយនឹងរង្វាស់ spectroradiometer ចល័ត។ Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69–79។
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., ការចាប់សញ្ញាពីចម្ងាយពីលើអាកាសក្នុងវិស័យកសិកម្ម៖ វិធីសាស្រ្តជាក់ស្តែងចំពោះការគ្របដណ្តប់តំបន់
និងផែនការផ្លូវសម្រាប់កងនាវានៃមនុស្សយន្តខ្នាតតូចនៅលើអាកាស។ J. Field Rob ។ ២៨ (៥), ៦៦៧–៦៨៩។ https://doi.org/28/rob.5 ។
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. ការស្ទង់មតិលើការអនុវត្តក្បួនដោះស្រាយការធ្វើផែនការផ្លូវសម្រាប់ UAVs ពហុ rotor ក្នុងភាពជាក់លាក់
កសិកម្ម។ J. Navig ។ ៧៥ (២), ៣៦៤–៣៨៣។
Basnet, B., Bang, J., 2018. បច្ចេកវិទ្យាទំនើបនៃកសិកម្មដែលពឹងផ្អែកលើចំណេះដឹង៖ ការពិនិត្យឡើងវិញលើប្រព័ន្ធចាប់សញ្ញាដែលបានអនុវត្ត និងការវិភាគទិន្នន័យ។ J. Sens. ឆ្នាំ 2018, 1–13 ។
Bendig, J., Bolten, A., Bareth, G., 2013. ការថតរូបភាពដែលមានមូលដ្ឋានលើ UAV សម្រាប់គំរូផ្ទៃដំណាំដែលមានគុណភាពបង្ហាញខ្ពស់ច្រើនដង ដើម្បីតាមដានការប្រែប្រួលនៃការលូតលាស់របស់ដំណាំ។ Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562។ https://doi ។ org/10.1127/1432-8364/2013/0200 ។
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. ការប៉ាន់ប្រមាណជីវម៉ាស់របស់ barley ដោយប្រើគំរូផ្ទៃដំណាំ (CSMs) ដែលទទួលបានពីរូបភាព RGB ដែលមានមូលដ្ឋានលើ UAV ។ ការចាប់អារម្មណ៍ពីចម្ងាយ 6 (11), 10395–10412។
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. រួមបញ្ចូលគ្នានូវកម្ពស់រុក្ខជាតិដែលមានមូលដ្ឋានលើ UAV ពីផ្ទៃដំណាំ ម៉ូដែល
អាចមើលឃើញ និងនៅជិតសន្ទស្សន៍បន្លែអ៊ីនហ្វ្រារ៉េដសម្រាប់ការត្រួតពិនិត្យជីវម៉ាសនៅក្នុង barley ។ Int. J. Appl ។ ផែនដី Obs ។ Geoinf ។ ៣៩, ៧៩–៨៧។ https://doi.org/39/j.jag.79 ។
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Ferreres, E., Villalobos, F., 2009a. ការធ្វើផែនទីបង្ហាញផ្លូវ និង CWSI នៅក្នុងចំការអូលីវដោយប្រើគុណភាពបង្ហាញខ្ពស់។
រូបភាពចាប់សញ្ញាពីចម្ងាយកម្ដៅ។ បរិស្ថាន Sens ពីចម្ងាយ។ ១១៣ (១១), ២៣៨០–២៣៨៨។ https://doi.org/113/j.rse.11 ។
Berni, JA, Zarco-Tejada, PJ, Suarez, ´ L., Ferreres, E., 2009b. ការចាប់អារម្មណ៍ពីចម្ងាយពហុវិសាលភាពកម្ដៅ និងក្រុមតូចចង្អៀតសម្រាប់ការត្រួតពិនិត្យបន្លែពីយានជំនិះគ្មានមនុស្សបើក។ IEEE Trans ។ ភូមិសាស្ត្រ។ ពីចម្ងាយ 47 (3), 722–738 ។
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. Internet of Things in food safety: ការពិនិត្យអក្សរសិល្ប៍ និងការវិភាគ bibliometric ។ និន្នាការអាហាររូបវិទ្យា។ បច្ចេកទេស។ ៩៤,៥៤–៦៤។ https://doi.org/94,54/j.tifs.64 ។
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT ក្នុងវិស័យកសិកម្ម៖ ការរចនាអ្នកបើកយន្តហោះខ្នាតធំនៅអឺរ៉ុប។ សហគមន៍ IEEE ។ ម៉ាច ៥៥ (៩), ២៦–៣៣។
Buters, TM, Belton, D., Cross, AT, 2019. Multi-sensor UAV តាមដានសំណាបនីមួយៗ និងសហគមន៍បណ្តុះកូននៅភាពត្រឹមត្រូវមីលីម៉ែត្រ។ ដ្រូន ៣ (៤), ៨១.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. ការវាយតម្លៃរូបភាពចម្រុះ និងសន្ទស្សន៍បន្លែសម្រាប់កម្មវិធីកសិកម្មច្បាស់លាស់ពីរូបភាព UAV ។ ការចាប់អារម្មណ៍ពីចម្ងាយ 7 (4), 4026–4047 ។ https://doi.org/10.3390/rs70404026 ។
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. ការតាមដានសូចនាករកំណើននៃជាតិស្ករដោយប្រើសន្ទស្សន៍បន្លែជួរធំទូលាយ (WDRVI) ដែលទទួលបានពី UAV
រូបភាពចម្រុះ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007. ការវិវឌ្ឍន៍នៃរចនាសម្ព័ន្ធបញ្ញានៃអក្សរសិល្ប៍អាជីវកម្មគ្រួសារ៖ ការសិក្សាព្រះគម្ពីរប៊ីប៊ីលីអូមេទ្រីនៃ FBR ។ អាជីវកម្មគ្រួសារ វិវរណៈ ២០ (២), ១៤១–១៦២។
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. ការត្រួតពិនិត្យថាមវន្តនៃជីវម៉ាស់ស្រូវក្រោម
ការព្យាបាលអាសូតផ្សេងៗគ្នាដោយប្រើ UAV ទម្ងន់ស្រាល ជាមួយនឹងកាមេរ៉ាថតរូបភាពស៊ុមពីរ។ វិធីសាស្រ្តដាំ 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8 ។
Chamuah, A., Singh, R., 2019. ការធានានិរន្តរភាពក្នុងវិស័យកសិកម្មឥណ្ឌាតាមរយៈ UAV ស៊ីវិល៖ ទស្សនវិស័យច្នៃប្រឌិតប្រកបដោយការទទួលខុសត្រូវ។ SN Appl ។ វិទ្យាសាស្ត្រ។ ២ (១), ១០៦. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. ការគ្រប់គ្រងប្រកបដោយទំនួលខុសត្រូវនៃយានជំនិះគ្មានមនុស្សបើកស៊ីវិល (UAV) ការច្នៃប្រឌិតសម្រាប់កម្មវិធីធានារ៉ាប់រងដំណាំរបស់ឥណ្ឌា។ J. ទទួលខុសត្រូវ
បច្ចេកទេស។ 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025 ។
Chen, A., Orlov-Levin, V., Meron, M., 2019. ការអនុវត្តការថតរូបលើអាកាសដែលអាចមើលឃើញកម្រិតច្បាស់ខ្ពស់នៃដំបូលដំណាំទៅនឹងការគ្រប់គ្រងប្រព័ន្ធធារាសាស្រ្តច្បាស់លាស់។ កសិកម្ម។ ទឹក។
គ្រប់គ្រង។ ២១៦, ១៩៦–២០៥។ https://doi.org/216/j.agwat.196 ។
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. UAV ទម្ងន់ស្រាល ជាមួយការថតរូបនៅលើយន្តហោះ និងទីតាំង GPS ប្រេកង់តែមួយ សម្រាប់កម្មវិធីម៉ែត្រ។ ISPRS J. Photogramm ។ អារម្មណ៍ពីចម្ងាយ ១២៧, ១១៥–១២៦។ https://doi.org/127/j.isprsjprs.115 ។
Dawaliby, S., Aberkane, A., Bradai, A., 2020. វេទិកា IoT ដែលមានមូលដ្ឋានលើ Blockchain សម្រាប់ការគ្រប់គ្រងប្រតិបត្តិការដ្រូនស្វ័យភាព។ នៅក្នុង: ដំណើរការនៃ ACM លើកទី 2
សិក្ខាសាលា MobiCom លើ Drone Assisted Wireless Communications សម្រាប់ 5G និង Beyond, ទំព័រ 31–36 ។ https://doi.org/10.1145/3414045.3415939 ។
Day, RA, Gastel, B., 1998. របៀបសរសេរ និងបោះពុម្ពក្រដាសវិទ្យាសាស្ត្រ។ សារព័ត៌មានសាកលវិទ្យាល័យខេមប្រ៊ីជ។ de Castro, AI, Pena, ˜ J.M, Torres-Sanchez, ´ J., Jim'enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. ការធ្វើផែនទី cynodon dactylon infesting គ្របដណ្ដប់លើដំណាំជាមួយនឹងនីតិវិធីដើមឈើ-OBIA ការសម្រេចចិត្តដោយស្វ័យប្រវត្តិ និងរូបភាព UAV សម្រាប់ភាពជាក់លាក់ viticulture ។ ការយល់ឃើញពីចម្ងាយ 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S' anchez, J., Pena, ˜ JM, Jim'enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018. ក្បួនដោះស្រាយព្រៃឈើចៃដន្យ - OBIA សម្រាប់ ការគូសផែនទីស្មៅដំបូងរវាង និងក្នុងជួរដំណាំដោយប្រើរូបភាព UAV ។ ការយល់ឃើញពីចម្ងាយ ១០ (២). https://doi.org/10/rs2 ។
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. ការវាស់វែងដោយស្វ័យប្រវត្តិនៃកម្ពស់រុក្ខជាតិនៃពូជស្រូវសាលីដោយប្រើ DSM ដែលបានមកពីរូបភាព UAV ។ ដំណើរការ 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163 ។
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. បណ្តាញការបែងចែកតាមន័យស្រាលសម្រាប់ការគូសផែនទីស្មៅតាមពេលវេលាជាក់ស្តែងដោយប្រើយានជំនិះគ្មានមនុស្សបើក។ អេបផល វិទ្យាសាស្ត្រ។ 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. ការចាប់សញ្ញាពីចម្ងាយពហុវិស័យដែលមានមូលដ្ឋានលើ UAV សម្រាប់កសិកម្មភាពជាក់លាក់៖ ការប្រៀបធៀបរវាងកាមេរ៉ាផ្សេងៗគ្នា។ ISPRS J. Photogramm ។ អារម្មណ៍ពីចម្ងាយ ១៤៦, ១២៤–១៣៦។
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. ការរៀនម៉ាស៊ីន និងបច្ចេកទេសចាប់សញ្ញាពីចម្ងាយបានអនុវត្តដើម្បីប៉ាន់ប្រមាណសូចនាករដី – ពិនិត្យ។ អេកូ។ Ind. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517 ។
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. រូបភាព UAV ខ្យល់ដែលមានគុណភាពបង្ហាញខ្ពស់ ដើម្បីវាយតម្លៃប៉ារ៉ាម៉ែត្រមកុដដើមឈើអូលីវដោយប្រើរូបថត 3D
ការកសាងឡើងវិញ៖ ការអនុវត្តក្នុងការសាកល្បងពូជ។ ការចាប់អារម្មណ៍ពីចម្ងាយ 7 (4), 4213–4232 ។ https://doi.org/10.3390/rs70404213 ។
Dixit, A., Jakhar, SK, 2021. ការគ្រប់គ្រងសមត្ថភាពអាកាសយានដ្ឋាន៖ ការពិនិត្យឡើងវិញ និងការវិភាគ bibliometric ។ J. Air Transp ។ គ្រប់គ្រង។ 91, 102010។
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, B., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019 ។
ការប្រើប្រាស់រូបភាព RapidEye ដើម្បីកំណត់ភាពប្រែប្រួលក្នុងវិស័យនៃការលូតលាស់ និងទិន្នផលដំណាំនៅ Ontario ប្រទេសកាណាដា។ កសិកម្មច្បាស់លាស់។ ២០ (៦), ១២៣១–១២៥០។ https://doi.org/20/
s11119-019-09646-w ។
Dutta, PK, Mitra, S., 2021. ការប្រើប្រាស់យន្តហោះគ្មានមនុស្សបើកកសិកម្ម និង iot ដើម្បីស្វែងយល់ពីខ្សែសង្វាក់ផ្គត់ផ្គង់អាហារក្នុងអំឡុងពេលក្រោយ COVID-19។ នៅក្នុង: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (Eds.), ព័ត៌មានកសិកម្ម៖ ស្វ័យប្រវត្តិកម្មដោយប្រើ IoT និងការរៀនម៉ាស៊ីន។ Wiley, ទំព័រ 67–87 ។ van Eck, N., Waltman, L., 2009. ការស្ទង់មតិផ្នែកទន់៖ VOSviewer ជាកម្មវិធីកុំព្យូទ័រសម្រាប់ការគូសផែនទី bibliometric ។ វិទ្យាសាស្រ្ត 84 (2), 523–538 ។ https://doi.org/10.1007/s11192-009-0146-3 ។
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindia, MN, 2018. ទិដ្ឋភាពទូទៅនៃ Internet of Things (IoT) និងការវិភាគទិន្នន័យក្នុងវិស័យកសិកម្ម៖ អត្ថប្រយោជន៍ និងបញ្ហាប្រឈម។
IEEE Internet Things J. 5 (5), 3758–3773។
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J.,Maeda, M., Chavez, JC, 2019. សុពលភាពនៃ agronomic UAV និងវាល
ការវាស់វែងសម្រាប់ពូជប៉េងប៉ោះ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៥៨, ២៧៨–២៨៣។ https://doi.org/158/j.compag.278 ។
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. High resolution multispectral and thermal sensing-based remote sensing-based water assessment in
ចម្ការទំពាំងបាយជូរស្រោចស្រពលើផ្ទៃដី។ Remote Sensing 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. ការប្រើប្រាស់ការចាប់សញ្ញាពីចម្ងាយខ្ពស់សម្រាប់កម្រិតដី។ Remote Sensing 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312 ។
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., Anderson, K., 2020. ការវាយតម្លៃពហុមាត្រនៃការឆ្លុះបញ្ចាំងលើផ្ទៃពហុspectral ដែលមានមូលដ្ឋានលើយន្តហោះគ្មានមនុស្សបើក និងសន្ទស្សន៍បន្លែនៅក្នុងលក្ខខណ្ឌប្រតិបត្តិការ។ ការចាប់អារម្មណ៍ពីចម្ងាយ 12 (3), 514 ។
Feng, X., Yan, F., Liu, X., 2019. ការសិក្សាអំពីបច្ចេកវិទ្យាទំនាក់ទំនងឥតខ្សែនៅលើ Internet of Things សម្រាប់កសិកម្មច្បាស់លាស់។ ឥតខ្សែ Pers ។ កុម្មុយនិស្ត។ ១០៨ (៣),
1785-1802 ។
Ferreira, MP, Pinto, CF, Serra, FR, 2014. ទ្រឹស្ដីនៃការចំណាយប្រតិបត្តិការក្នុងការស្រាវជ្រាវអាជីវកម្មអន្តរជាតិ៖ ការសិក្សា bibliometric ជាងបីទសវត្សរ៍។ វិទ្យាសាស្រ្ត 98 (3), 1899–1922 ។ https://doi.org/10.1007/s11192-013-1172-8 ។
Fisher, P., Abuzar, M., Rab, M., Best, F., Chandra, S., 2009. ភាពជឿនលឿនក្នុងវិស័យកសិកម្មច្បាស់លាស់នៅភាគអាគ្នេយ៍នៃប្រទេសអូស្ត្រាលី។ I. វិធីសាស្រ្តតំរែតំរង់ដើម្បីក្លែងធ្វើ
បំរែបំរួលលំហនៃទិន្នផលធញ្ញជាតិដោយប្រើទិន្នផលស្រូវជាប្រវត្តិសាស្ត្ររបស់កសិករ និងសន្ទស្សន៍ភាពខុសគ្នានៃបន្លែធម្មតា។ វិទ្យាសាស្ត្រដំណាំកសិកម្ម ៦០ (៩), ៨៤៤–៨៥៨។
Floreano, D., Wood, RJ, 2015. វិទ្យាសាស្ត្រ បច្ចេកវិទ្យា និងអនាគតនៃយន្តហោះគ្មានមនុស្សបើកស្វ័យប្រវត្តិខ្នាតតូច។ ធម្មជាតិ 521 (7553), 460–466 ។ https://doi.org/10.1038/nature14542 ។
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. អ៊ីនធឺណិតនៃអ្វីៗសម្រាប់អនាគតនៃកសិកម្មឆ្លាតវៃ៖ ការស្ទង់មតិដ៏ទូលំទូលាយនៃបច្ចេកវិទ្យាដែលកំពុងរីកចម្រើន។ IEEE CAA J. Autom ។ ស៊ីនីកា ៨ (៤), ៧១៨–៧៥២។
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. ការបែងចែករុក្ខជាតិឧទុម្ពរ ពីរូបភាពពីលើអាកាស ដោយប្រើបណ្តាញអ៊ិនកូដឌ័រ-ឌិកូដឌិកូដ convolutional ជ្រៅ។ Remote Sensing 11 (10), 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. UAVs ប្រកួតប្រជែងដើម្បីវាយតម្លៃភាពតានតឹងទឹកសម្រាប់
កសិកម្មនិរន្តរភាព។ កសិកម្ម។ ការគ្រប់គ្រងទឹក។ ១៥៣, ៩–១៩។ https://doi.org/153/j. agwat.9.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ andez, A., Guti´errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur´ an-Zuazo, VH, 2018. រូបភាពកំដៅ នៅរោងចក្រ
កម្រិតដើម្បីវាយតម្លៃស្ថានភាពដំណាំ-ទឹកនៅក្នុងដើមអាល់ម៉ុន (cv. Guara) ក្រោមយុទ្ធសាស្រ្តស្រោចស្រពឱនភាព។ កសិកម្ម។ ការគ្រប់គ្រងទឹក។ ២០៨, ១៧៦–១៨៦។ https://doi.org/208/j.
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. ការឆ្លុះបញ្ចាំងលើផ្ទៃ និងការវាស់វែង fluorescence spectroscopy ដោយពន្លឺព្រះអាទិត្យដោយប្រើ UAS hyperspectral តូច។ ការយល់ឃើញពីចម្ងាយ ៩ (៥), ៤៧២. https://doi.org/9/rs5. Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 472. វិធីសាស្ត្រស្វ័យប្រវត្តិសម្រាប់
ការគូសផែនទីស្មៅនៅក្នុងវាលស្មៅ ដោយផ្អែកលើរូបភាព UAV ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។
Gebbers, R., Adamchuk, VI, 2010. កសិកម្មច្បាស់លាស់ និងសន្តិសុខស្បៀង។ វិទ្យាសាស្រ្ត 327 (5967), 828–831 ។ https://doi.org/10.1126/science.1183899 ។
Geipel, J., Link, J., Claupein, W., 2014. រួមបញ្ចូលគ្នានូវគំរូវិសាលគម និងលំហនៃទិន្នផលពោតដោយផ្អែកលើរូបភាពពីលើអាកាស និងគំរូផ្ទៃដំណាំដែលទទួលបានជាមួយនឹងប្រព័ន្ធយន្តហោះគ្មានមនុស្សបើក។ ការចាប់អារម្មណ៍ពីចម្ងាយ 6 (11), 10335–10355 ។ https://doi.org/10.3390/rs61110335 ។
Geng, D., Feng, Y., Zhu, Q., 2020. ការរចនាប្រកបដោយនិរន្តរភាពសម្រាប់អ្នកប្រើប្រាស់៖ ការពិនិត្យអក្សរសិល្ប៍ និងការវិភាគគន្ថនិទ្ទេស។ បរិស្ថាន។ វិទ្យាសាស្ត្រ។ ការបំពុល។ Res. ២៧ (២៤), ២៩៨២៤–២៩៨៣៦។ https://doi ។ org/27/s24-29824-29836-10.1007 ។
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. ការបង្កើតផ្ទៃឆ្លើយតប spectraltemporal ដោយការរួមបញ្ចូលផ្កាយរណបពហុspectral និង hyperspectral
រូបភាព UAV សម្រាប់កម្មវិធីកសិកម្មច្បាស់លាស់។ IEEE J. Sel. កំពូល។ អេបផល ផែនដី Obs ។ ពីចម្ងាយ 8 (6), 3140–3146 ។ ttps://doi.org/10.1109/JSTARS.2015.2406339 ។
Gill, SS, Chana, I., Buyya, R., 2017. កសិកម្មដែលមានមូលដ្ឋានលើ IoT ជាពពក និងសេវាកម្មទិន្នន័យធំ៖ ការចាប់ផ្តើមនៃឌីជីថលឥណ្ឌា។ J. Org ។ និងកុំព្យូទ័រអ្នកប្រើប្រាស់ចុងក្រោយ។ (JOUEC) ២៩ (៤),
1-23 ។
Gmür, M., 2006. ការវិភាគការដកស្រង់ និងការស្វែងរកមហាវិទ្យាល័យដែលមើលមិនឃើញ៖ ការវាយតម្លៃវិធីសាស្រ្ត។ វិទ្យាសាស្រ្ត 57 (1), 27–57 ។ https://doi.org/10.1023/
a:1023619503005។
Gnadinger, ¨ F., Schmidhalter, U., 2017. ការរាប់ឌីជីថលនៃរុក្ខជាតិពោតដោយយានជំនិះគ្មានមនុស្សបើក (UAVs)។ ការយល់ឃើញពីចម្ងាយ ៩ (៦). គេហទំព័រ https://doi.org/9/rs6 ។
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. យានជំនិះគ្មានមនុស្សបើក Rotary-wing សម្រាប់ការឃ្លាំមើលស្មៅក្នុងទឹក និង
ការគ្រប់គ្រង។ J. Intell ។ ប្រព័ន្ធមនុស្សយន្ត៖ ទ្រឹស្តី។ អេបផល ៥៧ (១–៤), ៤៦៧–៤៨៤។ https://doi ។ org/57/s1-4-467-484 ។
Gomez-Cand ´on, ´ D., De Castro, AI, Lopez-Granados, ´ F., 2014. ការវាយតម្លៃភាពត្រឹមត្រូវនៃរូបចម្លាក់ពីយន្តហោះគ្មានមនុស្សបើក (UAV) រូបភាពសម្រាប់គោលបំណងកសិកម្មច្បាស់លាស់នៅក្នុងស្រូវសាលី។ ព្រីស។ កសិកម្ម។ ១៥ (១), ៤៤–៥៦។ https://doi.org/15/s1-44-56-10.1007 ។
Gomez-Cand ´on, ´ D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. ការវាយតំលៃលើវាលស្រែនៃភាពតានតឹងទឹកនៅមាត្រដ្ឋានដើមឈើដោយរូបភាពដែលយល់ដោយ UAV ៖ ការយល់ដឹងថ្មីសម្រាប់
ការទទួលបានកម្ដៅ និងការក្រិតតាមខ្នាត។ ព្រីស។ កសិកម្ម។ ១៧ (៦), ៧៨៦–៨០០។ https://doi.org/17/s6-786-800-10.1007 ។
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Ferreres, E., 2014. ការអនុវត្ត និងដែនកំណត់នៃការប្រើប្រាស់សន្ទស្សន៍ភាពតានតឹងទឹកដំណាំជាសូចនាករនៃឱនភាពទឹកនៅក្នុងចម្ការក្រូច។ កសិកម្ម។ សម្រាប់។ Meteorol ។ ១៩៨–១៩៩, ៩៤–១០៤។ https://doi.org/198/j. agrformet.199.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Ferreres, E., 2013. ការប្រើប្រាស់រូបភាពកំដៅ UAV ដែលមានកម្រិតភាពច្បាស់ខ្ពស់ដើម្បី
វាយតំលៃភាពប្រែប្រួលនៃស្ថានភាពទឹកនៃប្រភេទដើមឈើហូបផ្លែចំនួន 14 ប្រភេទនៅក្នុងចំការពាណិជ្ជកម្ម។ ព្រីស។ កសិកម្ម។ ១៤ (៦), ៦៦០–៦៧៨។ https://doi.org/6/s660-678-10.1007-11119 ។
Goyal, K., Kumar, S., 2021. អក្ខរកម្មហិរញ្ញវត្ថុ៖ ការពិនិត្យឡើងវិញជាប្រព័ន្ធ និងការវិភាគគន្ថនិទ្ទេស។ Int. J. Consumer Studies 45 (1), 80–105 ។ https://doi.org/10.1111/
ijcs.12605 ។
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. សក្ដានុពលនៃរូបភាពនៃ uavs តម្លៃទាបនៅក្នុងព្រៃឈើ និងកសិកម្ម។ បណ្ណសារអន្តរជាតិនៃកម្មវិធីថតរូប ការយល់ឃើញពីចម្ងាយ និងវិទ្យាសាស្ត្រព័ត៌មានលំហ - ISPRS Archives 37, 1207-1213។ https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e ។
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R., Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. ការវាយតម្លៃការជាប់ទាក់ទងគ្នានៃគុណភាពបង្ហាញខ្ពស់។
NDVI ជាមួយនឹងកម្រិតការប្រើប្រាស់ជី និងទិន្នផលស្រូវ និងដំណាំស្រូវសាលី ដោយប្រើ UAVs ខ្នាតតូច។ ការយល់ឃើញពីចម្ងាយ ១១ (២), ១១២.
Gundolf, K., Filser, M., 2013. ការស្រាវជ្រាវការគ្រប់គ្រង និងសាសនា៖ ការវិភាគដកស្រង់។ J. ឡានក្រុង។ ក្រមសីលធម៌ 112 (1), 177–185 ។
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. ការក្លែងធ្វើ CFD និងការផ្ទៀងផ្ទាត់ពិសោធន៍នៃលំហ និងការចែកចាយបណ្ដោះអាសន្ន
លំហូរខ្យល់ចុះក្រោមនៃ UAV កសិកម្ម quad-rotor នៅពីលើ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៧២, ១០៥៣៤៣ https://doi.org/172/j.compag.105343 ។
Haghighattalab, A., Gonz´ alez P´erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , ប៉ូឡូញ, J. , 2016 ។
ការអនុវត្តប្រព័ន្ធអាកាសគ្មានមនុស្សបើកសម្រាប់ phenotyping កម្រិតខ្ពស់នៃបណ្តុះកូនស្រូវសាលីធំ។ វិធីដាំ ១២ (១). https://doi.org/12/s1-
016-0134-6
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. ការថតរូបភាពពី UAVs ក្រោមលក្ខខណ្ឌនៃការបំភ្លឺខុសៗគ្នា . នៅក្នុង GG Bill R. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 40, Issue 1W2, pp. 189–194)។ សង្គមអន្តរជាតិសម្រាប់ការថតរូប និងការយល់ឃើញពីចម្ងាយ។ https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632 ។
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. ការវាយតម្លៃបច្ចេកទេសសម្រាប់គូសផែនទីបន្លែលើកោះពីអាកាសគ្មានមនុស្សបើក
រូបភាពយានជំនិះ (UAV)៖ ការចាត់ថ្នាក់ភីកសែល ការបកស្រាយដែលមើលឃើញ និងវិធីសាស្រ្តរៀនម៉ាស៊ីន។ Int. J. Appl ។ ផែនដី Obs ។ Geoinf ។ 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085។
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. ការធ្វើកសិកម្មឆ្លាតវៃតាមរយៈការដឹកនាំប្រកបដោយការទទួលខុសត្រូវក្នុងប្រទេសបង់ក្លាដែស៖ លទ្ធភាព ឱកាស និងលើសពីនេះ។
និរន្តរភាព ១៣ (៨), ៤៥១១.
Hardin, PJ, Hardin, TJ, 2010. យានជំនិះខ្នាតតូចដែលបានសាកល្បងពីចម្ងាយក្នុងការស្រាវជ្រាវបរិស្ថាន។ ភូមិសាស្ត្រត្រីវិស័យ 4 (9), 1297–1311 ។ ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x ។
Hardin, PJ, Jensen, RR, 2011. យានជំនិះគ្មានមនុស្សបើកខ្នាតតូច នៅក្នុងការចាប់សញ្ញាពីចម្ងាយបរិស្ថាន៖ បញ្ហាប្រឈម និងឱកាស។ GISci ។ វិញ្ញាណពីចម្ងាយ ៤៨ (១), ៩៩–១១១។ https://doi.org/48/1-99 ។
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. Agricultural Internet of Things: បច្ចេកវិទ្យា និងកម្មវិធី, (1st ed. 2021 edition). ស្ព្រីង។
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, ២០០៤។
រូបភាពពីយន្តហោះគ្មានមនុស្សបើក៖ ការឃ្លាំមើលកសិកម្ម និងការគាំទ្រការសម្រេចចិត្ត។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ៤៤ (១), ៤៩–៦១។ https://doi.org/44/j.
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, ការវាយបញ្ចូលវាលឆ្លងកាត់ខ្ពស់នៃកម្ពស់រុក្ខជាតិស្រូវសាលី និងអត្រាកំណើននៅក្នុងការសាកល្បងគ្រោងវាលដោយប្រើការចាប់សញ្ញាពីចម្ងាយដែលមានមូលដ្ឋានលើ UAV ។ ការយល់ឃើញពីចម្ងាយ ៨ (១២) ។ https://doi ។ org/8/rs12 ។
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. ដំណើរការ និងការវាយតម្លៃ រូបភាពស្តេរ៉េអូស្កុបដែលប្រមូលបានដោយប្រើកាមេរ៉ាប្រភេទ UAV ទម្ងន់ស្រាលសម្រាប់កសិកម្មច្បាស់លាស់។ ការចាប់អារម្មណ៍ពីចម្ងាយ 5 (10), 5006–5039 ។ https://doi.org/10.3390/rs5105006 ។
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. យានជំនិះគ្មានមនុស្សបើកនៅលើអាកាសដែលមានកម្ពស់ទាប ផ្អែកលើអ៊ីនធឺណិតនៃសេវាកម្ម៖ ការស្ទង់មតិទូលំទូលាយ និងទស្សនវិស័យនាពេលអនាគត។ IEEE Internet Things J. 3 (6), 899–922។ https://doi.org/10.1109/JIOT.2016.2612119 ។
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. រួមបញ្ចូលគ្នានូវលំហូរអុបទិក និងការរុករកតាមស្តេរ៉េអូនៃអន្លង់ក្នុងទីក្រុងសម្រាប់ UAV ។ ឆ្នាំ ២០០៥ IEEE/RSJ
សន្និសីទអន្តរជាតិស្តីពីមនុស្សយន្ត និងប្រព័ន្ធឆ្លាតវៃ ទំព័រ ៣៣០៩–៣៣១៦។ https://doi.org/3309/IROS.3316 ។
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. វេទិកាកសិកម្មច្នៃប្រឌិត IoT សម្រាប់កុំព្យូទ័រពពកអ័ព្ទ។ ទ្រទ្រង់។ កុំព្យូទ័រ។ Inf. ប្រព័ន្ធ ២៨, ១០០២៨៥។
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. បណ្តាញពេញលេញសម្រាប់ការគូសផែនទីស្មៅនៃយានអវកាសគ្មានមនុស្សបើក ( UAV) រូបភាព។ PLoS ONE 13 (4), e0196302។
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. ការរៀនស៊ីជម្រៅធៀបនឹងការវិភាគរូបភាពផ្អែកលើវត្ថុ (OBIA) ក្នុងការគូសផែនទីស្មៅនៃរូបភាព UAV ។ Int. ជ.
ពីចម្ងាយ 41 (9), 3446–3479 ។ https://doi.org/10.1080/01431161.2019.1706112 ។
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. ការក្រិតពណ៌ជ្រៅសម្រាប់រូបភាព UAV ក្នុងការត្រួតពិនិត្យដំណាំ
ដោយប្រើការផ្ទេររចនាប័ទ្ម semantic ជាមួយការយកចិត្តទុកដាក់ក្នុងស្រុកទៅសកល។ Int. J. Appl ។ ផែនដី Obs ។ Geoinf ។ 104, 102590 https://doi.org/10.1016/j.jag.2021.102590 ។
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. ការអភិវឌ្ឍន៍ និងការរំពឹងទុកនៃបច្ចេកវិទ្យាយានជំនិះគ្មានមនុស្សបើកសម្រាប់ផលិតកម្មកសិកម្ម
ការគ្រប់គ្រង។ Int. J. Agric ។ ប៊ីយ៉ូល។ អេង. ៦ (៣), ១–១០។ https://doi.org/6/j ។ ijabe.3.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. ការអភិវឌ្ឍន៍ប្រព័ន្ធបាញ់ថ្នាំសម្រាប់វេទិការថយន្តគ្មានមនុស្សបើក។ អេបផល អេង. កសិកម្ម។ ២៥ (៦), ៨០៣–៨០៩។
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. ការទិញយករូបថតឌីជីថល NIR-បៃតង-ខៀវ ពី
យន្តហោះគ្មានមនុស្សបើកសម្រាប់ត្រួតពិនិត្យដំណាំ។ ការចាប់អារម្មណ៍ពីចម្ងាយ 2 (1), 290–305 ។ https://doi ។ org/10.3390/rs2010290 ។ Inoue, Y., 2020. ការចាប់សញ្ញាពីចម្ងាយផ្អែកលើផ្កាយរណប និងយន្តហោះគ្មានមនុស្សបើកនៃដំណាំ និងដីសម្រាប់ការធ្វើកសិកម្មដ៏ឆ្លាតវៃ – ការពិនិត្យឡើងវិញ។ វិទ្យាសាស្ត្រដី។ រុក្ខជាតិ Nutr ។ ៦៦ (៦), ៧៩៨–៨១០។ https://doi.org/66/6 ។
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. ការពិនិត្យឡើងវិញនៃកម្មវិធី និងបច្ចេកវិទ្យាទំនាក់ទំនងសម្រាប់ Internet of Things (IoT) និង
យានជំនិះលើអាកាសគ្មានមនុស្សបើក (UAV) ដែលមានមូលដ្ឋានលើកសិដ្ឋានឆ្លាតវៃប្រកបដោយនិរន្តរភាព។ និរន្តរភាព 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. ការវាយតម្លៃភាពត្រឹមត្រូវនៃម៉ូដែលផ្ទៃឌីជីថលដែលមានគុណភាពបង្ហាញខ្ពស់ គណនាដោយ
PhotoScan® និង MicMac® នៅក្នុងលក្ខខណ្ឌស្ទង់មតិល្អបំផុត។ ការយល់ឃើញពីចម្ងាយ ៨ (៦), https://doi.org/8/rs6.
Jim'enez-Brenes, FM, Lopez-Granados, ´ F., Castro, AI, Torres-S' anchez, J., Serrano, N., Pena, ˜ JM, 2017. ការកំណត់បរិមាណផលប៉ះពាល់នៃការកាត់ចេញលើស្ថាបត្យកម្មដើមអូលីវ និងប្រចាំឆ្នាំ ការរីកលូតលាស់នៃ canopy ដោយប្រើគំរូ 3D ដែលមានមូលដ្ឋានលើ UAV ។ វិធីដាំ ១៣ (១). https://doi.org/13/s1-10.1186-13007-017 ។
Jin, X., Liu, S., Baret, F., Hemerl'e, M., Comar, A., 2017. ការប៉ាន់ប្រមាណនៃដង់ស៊ីតេរុក្ខជាតិនៃដំណាំស្រូវសាលី នៅពេលផុសចេញពីរូបភាព UAV រយៈកម្ពស់ទាបបំផុត។ ឧបករណ៍ចាប់សញ្ញាពីចម្ងាយ។
បរិស្ថាន។ ១៩៨, ១០៥–១១៤។ https://doi.org/198/j.rse.105 ។
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. ប្រព័ន្ធត្រួតពិនិត្យផលិតផលកសិកម្មដែលគាំទ្រដោយ cloud computing។ កុំព្យូទ័រចង្កោម។ ២២ (៤), ៨៩២៩–៨៩៣៨។
Ju, C., & Son, HI 2018a. ការវាយតម្លៃការអនុវត្តនៃប្រព័ន្ធ UAV ជាច្រើនសម្រាប់ការចាប់សញ្ញាពីចម្ងាយក្នុងវិស័យកសិកម្ម។ ការបន្តនៃសិក្ខាសាលាស្តីពីចក្ខុវិស័យមនុស្សយន្ត និងសកម្មភាពក្នុងវិស័យកសិកម្មនៅសន្និសីទអន្តរជាតិ IEEE ស្តីពីមនុស្សយន្ត និងស្វ័យប្រវត្តិកម្ម (ICRA) ទីក្រុងប្រ៊ីសបេន ប្រទេសអូស្ត្រាលី ២១–២៦។
Ju, C., Son, HI, 2018b. ប្រព័ន្ធ UAV ច្រើនសម្រាប់កម្មវិធីកសិកម្ម៖ ការត្រួតពិនិត្យ ការអនុវត្ត និងការវាយតម្លៃ។ អេឡិចត្រូនិច 7 (9), 162. https://doi.org/10.3390/
អេឡិចត្រូនិក 7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. សក្ដានុពលនៃការចាប់សញ្ញាពីចម្ងាយ និងបញ្ញាសិប្បនិម្មិត ជាឧបករណ៍ដើម្បីកែលម្អ
ភាពធន់នៃប្រព័ន្ធផលិតកម្មកសិកម្ម។ Curr ។ មតិ។ ជីវបច្ចេកវិទ្យា។ ៧០, ១៥–២២។ https://doi.org/70/j.copbio.15 ។
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. ឆ្នាំ 2019 ។ បច្ចេកទេសរុករកដំណាំដែលប្រសើរឡើង ដោយរួមបញ្ចូលរូបភាពដំណាំពហុទិដ្ឋភាពដែលបានជួយដល់យានជំនិះគ្មានមនុស្សបើក ទៅក្នុងការអនុវត្តសកម្មភាពកាយរឹទ្ធិធម្មតាសម្រាប់ជម្ងឺរលាកទងសួតនៅក្នុងផ្លែឪឡឹក។ Plant Dis. ១០៣ (៧), ១៦៤២–១៦៥០។
Kapoor, KK, Tamilmani, K., Rana, NP, Patil, P., Dwivedi, YK, Nerur, S., 2018. វឌ្ឍនភាពក្នុងការស្រាវជ្រាវប្រព័ន្ធផ្សព្វផ្សាយសង្គម៖ អតីតកាល បច្ចុប្បន្នកាល និងអនាគតកាល។ ជូនដំណឹង។ ប្រព័ន្ធ ខាងមុខ។ ២០
(3), 531-558 ។
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: បណ្តាញរកឃើញជំងឺ vine ដោយផ្អែកលើរូបភាពចម្រុះ និងផែនទីជម្រៅ។ Remote Sensing 12 (20), 3305. https://doi. org/10.3390/rs12203305 ។
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. ការប្រៀបធៀបនៃផ្កាយរណប និងរូបភាពពហុវិស័យដែលមានមូលដ្ឋានលើ UAV សម្រាប់ចម្ការទំពាំងបាយជូរ
ការវាយតម្លៃភាពប្រែប្រួល។ ការយល់ឃើញពីចម្ងាយ ១១ (៤). https://doi.org/11/rs4 ។
Khan, PW, Byun, Y.-C., Park, N., 2020. IoT-blockchain បានបើកដំណើរការប្រព័ន្ធ provenance ល្អបំផុតសម្រាប់ឧស្សាហកម្មម្ហូបអាហារ 4.0 ដោយប្រើការរៀនសូត្រជ្រៅជ្រះកម្រិតខ្ពស់។ ឧបករណ៍ចាប់សញ្ញា 20 (10), 2990 ។
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. ការរកឃើញរូបភាពនៃជំងឺរុក្ខជាតិ៖ ពីការរៀនម៉ាស៊ីនបុរាណរហូតដល់ដំណើរសិក្សាជ្រៅជ្រះ។ សហគមន៍ឥតខ្សែ។ កុំព្យូទ័រចល័ត។ ឆ្នាំ 2021, 1–13 ។
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. ក្របខ័ណ្ឌគ្រប់គ្រងពាក់កណ្តាលប្រលោមលោកថ្មីសម្រាប់ការចាត់ថ្នាក់ដំណាំ/ស្មៅដោយផ្អែកលើ UAV ។ PLoS ONE 16 (5), e0251008។
Khanal, S., Fulton, J., Shearer, S., 2017. ទិដ្ឋភាពទូទៅនៃកម្មវិធីបច្ចុប្បន្ន និងសក្តានុពលនៃការចាប់សញ្ញាពីចម្ងាយកម្ដៅក្នុងវិស័យកសិកម្មច្បាស់លាស់។ កុំព្យូទ័រ។ អេឡិចត្រុង។
កសិកម្ម។ ១៣៩, ២២–៣២។ https://doi.org/139/j.compag.22 ។
Khanna, A., Kaur, S., 2019. ការវិវត្តន៍នៃ Internet of Things (IoT) និងផលប៉ះពាល់ដ៏សំខាន់របស់វានៅក្នុងវិស័យកសិកម្មជាក់លាក់។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៥៧, ២១៨–២៣១។
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. ការចូលរួមរបស់និយោជិតសម្រាប់អង្គការប្រកបដោយនិរន្តរភាព៖ ការវិភាគពាក្យគន្លឹះដោយប្រើការវិភាគបណ្តាញសង្គម និងផ្ទុះ
វិធីសាស្រ្តរាវរក។ និរន្តរភាព ៨ (៧), ៦៣១.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. សមាហរណកម្ម ពីដីគោក និងយន្តហោះគ្មានមនុស្សបើក
វិធីសាស្ត្រចាប់អារម្មណ៍តាមរូបភាពខ្ពស់ និងរូបភាពសម្រាប់ធ្វើផែនទីរុករក និងការត្រួតពិនិត្យការរុករករ៉ែ។ Remote Sensing 10 (9), 1366. https://doi.org/10.3390/
rs10091366 ។
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. ការរាប់រុក្ខជាតិពោតដោយប្រើការរៀនស៊ីជម្រៅ និងរូបភាព UAV ។ IEEE Geosci ។ សេនពីចម្ងាយ Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549។
Koh, JCO, Spangenberg, G., Kant, S., 2021. ការរៀនម៉ាស៊ីនស្វ័យប្រវត្តិសម្រាប់ការវាយអក្សររុក្ខជាតិដោយផ្អែកលើរូបភាពកម្រិតខ្ពស់។ ការយល់ឃើញពីចម្ងាយ 13 (5), 858. https://
doi.org/10.3390/rs13050858 ។
Kovalev, IV, Voroshilova, AA, 2020. និន្នាការបច្ចេកវិជ្ជាទំនើបក្នុងការអភិវឌ្ឍន៍ប្រព័ន្ធអេកូនៃ UAVs ដឹកទំនិញ។ J. Phys ។ Conf. ស៊ែរ ១៥១៥ (៥), ០៥២០៦៨ https://doi. org/1515/5-052068/10.1088/1742/6596 ។
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. Visual SLAM សម្រាប់ការចិញ្ចឹមសត្វក្នុងផ្ទះ និងការចិញ្ចឹមសត្វដោយប្រើយន្តហោះគ្មានមនុស្សបើកខ្នាតតូចជាមួយកាមេរ៉ា monocular៖ ការសិក្សាលទ្ធភាព។
Drones 5 (2), 41. https://doi.org/10.3390/Drones5020041.
Kulbacki, M., Segen, J., Knie'c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. ការស្ទង់មតិលើយន្តហោះគ្មានមនុស្សបើកសម្រាប់ស្វ័យប្រវត្តិកម្មកសិកម្ម ពីដាំទៅ
ការប្រមូលផល។ នៅក្នុង៖ INES 2018 – IEEE 22nd International Conference on Intelligent Engineering Systems, pp. 000353–358។ https://doi.org/10.1109/INES.2018.8523943 ។
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT framework views and challenges: ឆ្ពោះទៅរកការការពារយន្តហោះគ្មានមនុស្សបើកជា "រឿង"។ ឧបករណ៍ចាប់សញ្ញា 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. ដំណើរការរូបភាព និងចំណាត់ថ្នាក់នៃនីតិវិធីសម្រាប់ការវិភាគនៃរូបភាពអនុ decimeter ដែលទទួលបានជាមួយនឹងយន្តហោះគ្មានមនុស្សបើកនៅលើដីស្ងួត។
ជួរភ្នំ។ GISci ។ វិញ្ញាណពីចម្ងាយ ៤៨ (១), ៤–២៣។ https://doi.org/48/1-4 ។
Laliberte, AS, Rango, A., Herrick, JE, 2007. យានជំនិះគ្មានមនុស្សបើកសម្រាប់ការគូសផែនទី និងការត្រួតពិនិត្យជួរភ្នំ៖ ការប្រៀបធៀបនៃប្រព័ន្ធពីរ។ ដំណើរការសន្និសីទប្រចាំឆ្នាំ ASPRS ។
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. លំហូរការងារប្រភពបើកចំហសម្រាប់ការគូសផែនទីស្មៅនៅក្នុងវាលស្មៅដើមកំណើត
ការប្រើប្រាស់យានគ្មានមនុស្សបើក៖ ការប្រើប្រាស់ Rumex obtusifolius ជាករណីសិក្សា។ អឺរ៉ូ។ J.Remote Sens. 54 (sup1), 71–88 ។ https://doi.org/10.1080/22797254.2020.1793687 ។
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. ការអនុម័ត ប្រាក់ចំណេញ និងការប្រើប្រាស់ទិន្នន័យកសិកម្មច្បាស់លាស់កាន់តែប្រសើរ។
ក្រដាសការងារ។ សាកលវិទ្យាល័យ Purdue ។ https://doi.org/10.22004/ag.econ.28615 ។
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb'e, S., Baret, F., 2008. ការវាយតម្លៃរូបភាពយានជំនិះគ្មានមនុស្សបើកសម្រាប់ការត្រួតពិនិត្យបរិមាណនៃដំណាំស្រូវសាលីនៅក្នុងដីតូចៗ។ ឧបករណ៍ចាប់សញ្ញា 8 (5), 3557–3585 ។ https://doi.org/10.3390/s8053557 ។
Li, C., Niu, B., 2020. ការរចនានៃកសិកម្មឆ្លាតវៃដោយផ្អែកលើទិន្នន័យធំ និងអ៊ីនធឺណិតនៃអ្វីៗ។ Int. J. ចែកចាយ។ Sens. Netw ។ ១៦ (៥) ttps://doi.org/16/5 ។
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. ការប៉ាន់ប្រមាណពីចម្ងាយនៃកម្ពស់ canopy និង biomass ខាងលើដីនៃពោតដោយប្រើរូបភាពស្តេរ៉េអូដែលមានគុណភាពបង្ហាញខ្ពស់ពី a ប្រព័ន្ធយានជំនិះគ្មានមនុស្សបើក តម្លៃទាប។ អេកូ។ លេខ ៦៧, ៦៣៧–៦៤៨។ https://doi.org/67/j.ecolind.637 ។
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. ការរៀនម៉ាស៊ីនក្នុងវិស័យកសិកម្ម៖ ការពិនិត្យឡើងវិញ។ ឧបករណ៍ចាប់សញ្ញា 18 (8), 2674 ។
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. ពីចម្ងាយ, ពីលើអាកាស phenotyping នៃលក្ខណៈពោតជាមួយនឹងវិធីសាស្រ្តពហុឧបករណ៍ចាប់សញ្ញាចល័ត។ វិធីសាស្រ្តដាំ 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. ការរកឃើញ និងការរាប់កួរ Sorghum ដោយប្រើរូបភាពប្រព័ន្ធអាកាសគ្មានមនុស្សបើក និងការរៀនស៊ីជម្រៅ។ ខាងមុខ។ វិទ្យាសាស្ត្ររុក្ខជាតិ។ ១១.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. ប្រព័ន្ធត្រួតពិនិត្យអ៊ីនធឺណិតនៃអ្វីៗនៃកសិកម្មបែបអេកូទំនើបដោយផ្អែកលើ cloud computing។ IEEE Access 7, 37050–37058។
Lopez-Granados, ´ F., 2011. ការរកឃើញស្មៅសម្រាប់ការគ្រប់គ្រងស្មៅជាក់លាក់នៃគេហទំព័រ៖ វិធីសាស្រ្តផែនទី និងពេលវេលាជាក់ស្តែង។ ស្មៅ Res ។ ៥១ (១), ១–១១។ https://doi.org/51/j.1-1.x ។
Lopez-Granados, ´ F., Torres-Sanchez, ´ J., De Castro, A.-I., Serrano-P´erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. ការត្រួតពិនិត្យដើមស្មៅដែលមានមូលដ្ឋានលើវត្ថុនៅក្នុងដំណាំស្មៅដោយប្រើរូបភាព UAV ដែលមានគុណភាពបង្ហាញខ្ពស់។ អាហ្គ្រីន។ ទ្រទ្រង់។ Dev. ៣៦ (៤), ១–១២
Lopez-Granados, ´ F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016 ។ ការធ្វើផែនទីស្មៅនៅដើមរដូវក្នុងផ្កាឈូករ័ត្នដោយប្រើបច្ចេកវិទ្យា UAV៖ ភាពប្រែប្រួលនៃផែនទីព្យាបាលស្មៅប្រឆាំងនឹងកម្រិតស្មៅ។ ព្រីស។ កសិកម្ម។ ១៧ (២), ១៨៣–១៩៩។
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS – imaging spectroscopy from multirotor unmanned aircraft system. J. Field Rob ។ ៣១ (៤),
៥៧១–៥៩០។ https://doi.org/571/rob.590 ។
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Klemola, J., 2008. ការស្កែនឡាស៊ែរលើដីនៃ ដំណាំកសិកម្ម។ នៅ JJ
Chen J. Maas H-G. ។
សង្គមអន្តរជាតិសម្រាប់ការថតរូប និងការយល់ឃើញពីចម្ងាយ។ https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. ការពិនិត្យឡើងវិញលើការចាត់ថ្នាក់រូបភាពគម្របដីដែលមានការត្រួតពិនិត្យ។ ISPRS J. Photogramm ។ វិញ្ញាណពីចម្ងាយ ១៣០,
២៧៧–២៩៣។ https://doi.org/277/j.isprsjprs.293 ។
Maes, WH, Steppe, K., 2019. ទស្សនវិស័យសម្រាប់ការចាប់សញ្ញាពីចម្ងាយជាមួយយានជំនិះគ្មានមនុស្សបើកក្នុងវិស័យកសិកម្មច្បាស់លាស់។ និន្នាការ Plant Sci ។ ២៤ (២), ១៥២–១៦៤។ https://doi.org/24/j.tplants.2 ។
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017 ។
ប្រព័ន្ធអាកាសគ្មានមនុស្សបើក (UAS) ផ្អែកលើ phenotyping នៃសណ្តែកសៀង ដោយប្រើ multi-sensor data fusion និង extreme learning machine។ ISPRS J. Photogramm ។ វិញ្ញាណពីចម្ងាយ ១៣៤, ៤៣–៥៨។ https://doi.org/134/j.isprsjprs.43 ។ Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 58។
ការត្រួតពិនិត្យដំណាំដោយប្រើផ្កាយរណប/UAV រួមបញ្ចូលគ្នា និងការរៀនម៉ាស៊ីន។ ការយល់ឃើញពីចម្ងាយ 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G ., Mullerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P'erez, G., Su, Z., Vico, G., Toth , ខ., 2018. ស្តីពីការប្រើប្រាស់ប្រព័ន្ធអាកាសគ្មានមនុស្សបើកសម្រាប់
ការត្រួតពិនិត្យបរិស្ថាន។ ការចាប់អារម្មណ៍ពីចម្ងាយ 10 (4), 641 ។
Marinko, RA, 1998. ការដកស្រង់ទៅកាន់ទស្សនាវដ្ដីសិក្សារបស់ស្ត្រីនៅក្នុងនិក្ខេបបទ, 1989 និង The Serials Librarian 35 (1–2), 29–44 ។ https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. ការគ្រប់គ្រងធនធាននៅក្នុងបណ្តាញឥតខ្សែដែលគាំទ្រដោយ UAV៖ ទស្សនវិស័យបង្កើនប្រសិទ្ធភាព។ អាដហុក Netw. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596 ។
Matese, A., Di Gennaro, SF, 2018. ការអនុវត្តជាក់ស្តែងនៃ multisensor UAV platform ផ្អែកលើរូបភាពពហុspectral, thermal និង RGB ដែលមានកម្រិតភាពច្បាស់ខ្ពស់
វល្លិ។ កសិកម្ម ៨ (៧), ១១៦. https://doi.org/8/agriculture7.
Matese, A., Di Gennaro, SF, 2021. លើសពីសន្ទស្សន៍ NDVI ប្រពៃណីដែលជាកត្តាគន្លឹះក្នុងការបញ្ជ្រាបការប្រើប្រាស់ UAV ក្នុងការដាំដុះដំណាំដ៏ជាក់លាក់។ វិទ្យាសាស្ត្រ។ Rep. 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 ការប្រៀបធៀបនៃ UAV យន្តហោះ
និងប្រព័ន្ធចាប់សញ្ញាពីចម្ងាយផ្កាយរណបសម្រាប់ការដាំដុះយ៉ាងជាក់លាក់។ ការចាប់អារម្មណ៍ពីចម្ងាយ 7 (3), 2971–2990 ។ https://doi.org/10.3390/rs70302971 ។
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. UAV និងការរៀនម៉ាស៊ីនផ្អែកលើសន្ទស្សន៍បន្លែដែលជំរុញដោយផ្កាយរណបសម្រាប់ភាពជាក់លាក់
កសិកម្ម។ ឧបករណ៍ចាប់សញ្ញា 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990. ការគូសផែនទីអ្នកនិពន្ធនៅក្នុងលំហបញ្ញា៖ ទិដ្ឋភាពទូទៅនៃបច្ចេកទេស។ J. Am. Soc ព័ត៌មាន។ វិទ្យាសាស្ត្រ។ ៤១ (៦), ៤៣៣–៤៤៣។
Meinen, BU, Robinson, DT, 2021. គំរូសំណឹកកសិកម្ម៖ ការវាយតម្លៃការប៉ាន់ប្រមាណទំហំដី USLE និង WEPP ដោយប្រើទិន្នន័យស៊េរីពេលវេលា UAV ។ បរិស្ថាន។ គំរូ។ កម្មវិធី 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. ការចាត់ថ្នាក់នៃសហគមន៍វាលស្មៅដែលមានដើមកំណើតនៅតំបន់ទំនាប ដោយប្រើរូបភាពប្រព័ន្ធគ្មានមនុស្សបើក (UAS) ខ្ពស់ក្នុងរូបភាព
ដីកណ្តាល Tasmanian ។ យន្តហោះគ្មានមនុស្សបើក ៣ (១), ៥.
Messina, G., Modica, G., 2020. កម្មវិធីនៃរូបភាពកម្ដៅ UAV ក្នុងវិស័យកសិកម្មច្បាស់លាស់៖ ស្ថានភាពសិល្បៈ និងទស្សនវិស័យស្រាវជ្រាវនាពេលអនាគត។ ការយល់ឃើញពីចម្ងាយ 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. ការសិក្សាគន្ថនិទ្ទេសអំពីទិន្នន័យធំ៖ គំនិត និន្នាការ និងបញ្ហាប្រឈម។ ការគ្រប់គ្រងដំណើរការអាជីវកម្ម។ J. 23 (3),
555-573 ។
Mochida, K., Saisho, D., Hirayama, T., 2015. ការកែលម្អដំណាំដោយប្រើសំណុំទិន្នន័យវដ្តជីវិតដែលទទួលបានក្រោមលក្ខខណ្ឌវាល។ ខាងមុខ។ វិទ្យាសាស្ត្ររុក្ខជាតិ។ ៦ https://doi.org/6/
fpls.2015.00740 ។
Mogili, UM.R., Deepak, BBVL, 2018. ពិនិត្យលើការអនុវត្តប្រព័ន្ធ Drone ក្នុងវិស័យកសិកម្មច្បាស់លាស់។ កុំព្យូទ័រ Procedia ។ វិទ្យាសាស្ត្រ។ ១៣៣, ៥០២–៥០៩។
Moharana, S., Dutta, S., 2016. ភាពប្រែប្រួលតាមលំហនៃសារធាតុក្លរ៉ូហ្វីល និងអាសូតនៃអង្ករពីរូបភាពអតិសុខុមប្រាណ។ ISPRS J. Photogramm ។ វិញ្ញាណពីចម្ងាយ ១២២, ១៧–២៩។
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
Nillaor, P., 2019. IoT និងការវិភាគទិន្នន័យកសិកម្មសម្រាប់កសិដ្ឋានឆ្លាតវៃ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៥៦, ៤៦៧–៤៧៤។
Nansen, C., Elliott, N., 2016. ការយល់ឃើញពីចម្ងាយ និងការឆ្លុះបញ្ចាំងទម្រង់នៅក្នុង entomology ។ អាន់នូ។ Rev. Entomol ។ ៦១ (១), ១៣៩–១៥៨។ https://doi.org/61/annurev-ento1-139 ។
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. Multispectral mapping in Agriculture: terrain mosaic using an autonomous quadcopter UAV. Int. Conf.
ប្រព័ន្ធយន្តហោះគ្មានមនុស្សបើក (ICUAS) 2016, 1351–1358។ https://doi.org/10.1109/ ICUAS.2016.7502606 ។
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. Internet of Drone things (Iodt)៖ អនាគតនៃយន្តហោះគ្មានមនុស្សបើកឆ្លាតវៃ។ Adv. Intel ប្រព័ន្ធ កុំព្យូទ័រ។ ១០៤៥, ៥៦៣–៥៨០។ https://doi.org/1045/563-580-10.1007-978-981_15 ។
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. ឧបករណ៍ចាប់សញ្ញាពហុពន្លឺទម្ងន់ស្រាលសម្រាប់ micro UAV—ឱកាសសម្រាប់ការចាប់សញ្ញាពីចម្ងាយតាមអាកាសដែលមានកម្រិតច្បាស់ខ្ពស់។ Int. Arch. រូបថត។ Spat ពីចម្ងាយ។ Inf. Sci 37 (B1), 1193–1200 ។
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. កម្មវិធី UAV ដែលកំពុងរីកចម្រើនក្នុងវិស័យកសិកម្ម។ នៅឆ្នាំ 2019 សន្និសីទអន្តរជាតិលើកទី 7 ស្តីពីបច្ចេកវិទ្យាវៃឆ្លាតរបស់មនុស្សយន្ត និង
កម្មវិធី (RiTA) ទំព័រ 254–257 ។ https://doi.org/10.1109/RITAPP.2019.8932853 ។
Nerur, SP, Rasheed, AA, Natarajan, V. , 2008. រចនាសម្ព័នបញ្ញានៃផ្នែកគ្រប់គ្រងយុទ្ធសាស្ត្រ៖ ការវិភាគសំអាងដោយអ្នកនិពន្ធ។ យុទ្ធសាស្ត្រ។ គ្រប់គ្រង។ J. 29 (3),
319-336 ។
Neupane, K., Baysal-Gurel, F., 2021. ការកំណត់អត្តសញ្ញាណដោយស្វ័យប្រវត្តិ និងការត្រួតពិនិត្យជំងឺរុក្ខជាតិដោយប្រើយានជំនិះគ្មានមនុស្សបើក៖ ការពិនិត្យឡើងវិញ។ Remote Sensing 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV សម្រាប់កម្មវិធីគូសផែនទី 3D៖ ការពិនិត្យឡើងវិញ។ អេបផល ភូមិសាស្ត្រ ៦ (១), ១–១៥ ។ https://doi.org/6/s1-1-15-x ។
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. ការប៉ាន់ស្មាន Evapotranspiration ជាមួយ UAVs តូចៗក្នុងវិស័យកសិកម្មច្បាស់លាស់។ ឧបករណ៍ចាប់សញ្ញា 20 (22), 6427. https://
doi.org/10.3390/s20226427 ។
Osareh, F., 1996. Bibliometrics, Citation Analysis and Co-Citation Analysis ។ ការពិនិត្យឡើងវិញនៃអក្សរសិល្ប៍ I 46 (3), 149–158 ។ https://doi.org/10.1515/libr.1996.46.3.149 ។
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, sensors, and data processing in agroforestry: ការពិនិត្យឡើងវិញចំពោះការអនុវត្តជាក់ស្តែង។ Int. J. Remote Sens. ៣៨ (៨–១០), ២៣៤៩–២៣៩១។ https://doi.org/38/8 ។
Panday, US, Pratihast, AK, Aryal, J., Kayastha, RB, 2020. ការពិនិត្យឡើងវិញលើដំណោះស្រាយទិន្នន័យផ្អែកលើយន្តហោះគ្មានមនុស្សបើកសម្រាប់ដំណាំធញ្ញជាតិ។ ដ្រូន ៤ (៣), ១–២៩។ https://doi.org/4/
យន្តហោះគ្មានមនុស្សបើក 4030041 ។
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. ការប៉ាន់ប្រមាណមាតិកាប្រេង និងប្រូតេអ៊ីននៃគ្រាប់ល្ងដោយប្រើដំណើរការរូបភាព និងបណ្តាញសរសៃប្រសាទសិប្បនិម្មិត។ J. Am. ប្រេង
Soc អ្នកគីមីវិទ្យា ៩៧ (៧), ៦៩១–៧០២។
Pena, ˜ JM, Torres-S'anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., ការធ្វើផែនទីស្មៅនៅក្នុងវាលស្រែដើមរដូវដោយប្រើការវិភាគតាមវត្ថុ នៃ
រូបថតរបស់ Unmanned Aircraft (UAV)។ PLoS ONE 8 (10), e77151 ។
P'erez-Ortiz, M., Pena, ˜ JM, Guti'errez, PA, Torres-S' anchez, J., Herv' as-Martínez, C.,
Lopez-Granados, ´ F., 2015. ប្រព័ន្ធពាក់កណ្តាលត្រួតពិនិត្យសម្រាប់ការគូសផែនទីស្មៅនៅក្នុងដំណាំផ្កាឈូករ័ត្ន ដោយប្រើយានជំនិះគ្មានមនុស្សបើក និងវិធីសាស្ត្រចាប់ជួរដំណាំ។ អេបផល កុំព្យូទ័រទន់។ J. ៣៧, ៥៣៣–៥៤៤។ https://doi.org/37/j.asoc.533 ។
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. ឧបករណ៍ IoT ដែលមានប្រសិទ្ធិភាពចំណាយជាប្រភពទិន្នន័យគួរឱ្យទុកចិត្តសម្រាប់ប្រព័ន្ធគ្រប់គ្រងទឹកដែលមានមូលដ្ឋានលើ blockchain ក្នុងវិស័យកសិកម្មច្បាស់លាស់។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៨០, ១០៥៨៨៩។
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. ប្រព័ន្ធ UAV-WSN កម្រិតខ្ពស់សម្រាប់ការត្រួតពិនិត្យឆ្លាតវៃក្នុងវិស័យកសិកម្មច្បាស់លាស់។ ឧបករណ៍ចាប់សញ្ញា 20 (3), https://doi.org/10.3390/s20030817 ។
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. កម្មវិធី Blockchain ក្នុងខ្សែសង្វាក់ផ្គត់ផ្គង់ ការដឹកជញ្ជូន និងភស្តុភារ៖ ការពិនិត្យឡើងវិញជាប្រព័ន្ធនៃអក្សរសិល្ប៍។ Int. J. Prod ។ Res. ៥៨ (៧), ២០៦៣–២០៨១។
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. យានជំនិះគ្មានមនុស្សបើកដែលអាចបត់បែនបានសម្រាប់កសិកម្មច្បាស់លាស់។
ព្រីស។ កសិកម្ម។ ១៣ (៤), ៥១៧–៥២៣។ https://doi.org/13/s4-517-523-10.1007 ។
Pritchard, A., 1969. គន្ថនិទ្ទេសស្ថិតិ ឬគន្ថនិទ្ទេស។ J. ឯកសារ។ ២៥ (៤), ៣៤៨–៣៤៩។
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. ភាពសមស្របនៃយានជំនិះគ្មានមនុស្សបើក (UAV) សម្រាប់ការវាយតម្លៃលើវាលពិសោធន៍ និងដំណាំ។ កសិកម្ម 99 (4), 431–436 ។
Puri, V., Nayyar, A., Raja, L., 2017. យន្តហោះគ្មានមនុស្សបើកកសិកម្ម៖ របកគំហើញទំនើបក្នុងវិស័យកសិកម្មច្បាស់លាស់។ J. Statis ។ គ្រប់គ្រង។ ប្រព័ន្ធ ២០ (៤), ៥០៧–៥១៨។
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. ការចងក្រងនៃកម្មវិធី UAV សម្រាប់កសិកម្មច្បាស់លាស់។ កុំព្យូទ័រ។ Netw ។ ១៧២,
107148 https://doi.org/10.1016/j.comnet.2020.107148 ។
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. កម្មវិធីនៃការវិភាគទិន្នន័យធំ និងបញ្ញាសិប្បនិម្មិតក្នុងការស្រាវជ្រាវកសិកម្ម។ ជនជាតិឥណ្ឌា J. Agron ។ ៦៥ (៤), ៣៨៣–៣៩៥។
Raparelli, E., Bajocco, S., 2019. ការវិភាគគន្ថនិទ្ទេសស្តីពីការប្រើប្រាស់យានជំនិះគ្មានមនុស្សបើកក្នុងការសិក្សាកសិកម្ម និងព្រៃឈើ។ Int. J. Remote Sens. 40 (24),
9070–9083 ។ https://doi.org/10.1080/01431161.2019.1569793 ។
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013 ។
ការប្រើប្រាស់សក្តានុពលនៃប្រព័ន្ធយន្តហោះគ្មានមនុស្សបើកខ្នាតតូច (UAS) ក្នុងការស្រាវជ្រាវស្មៅ។ ស្មៅ Res ។ ៥៣ (៤), ២៤២–២៤៨។
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., គឺជាសន្ទស្សន៍បន្លែដែលបានមកពីកាមេរ៉ាកម្រិតអ្នកប្រើប្រាស់ដែលបានដំឡើងនៅលើ
UAVs អាចទុកចិត្តបានគ្រប់គ្រាន់សម្រាប់ការវាយតម្លៃលើដីពិសោធន៍? អឺរ៉ូ។ J. Agron ។ ៧៤, ៧៥–៩២។ https://doi.org/74/j.eja.75 ។
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. ឌីជីថលភាវូបនីយកម្មក្នុងសង្វាក់ផ្គត់ផ្គង់អាហារ៖ ការពិនិត្យព្រះគម្ពីរ និងផ្លូវសំខាន់នៃផ្លូវសំខាន់
ការវិភាគ។ និរន្តរភាព ១៤ (១), ៨៣. https://doi.org/14/su1.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. យន្តហោះគ្មានមនុស្សបើកសម្រាប់ការគ្រប់គ្រងខ្សែសង្វាក់ផ្គត់ផ្គង់ និងភស្តុភារ៖ របៀបវារៈពិនិត្យឡើងវិញ និងស្រាវជ្រាវ។ Int. J. Logist ។ Res. អេបផល
1–24 ។ https://doi.org/10.1080/13675567.2021.1981273 ។
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. បច្ចេកវិជ្ជា Blockchain ក្នុងការគ្រប់គ្រងភស្តុភារ និងការផ្គត់ផ្គង់: ការពិនិត្យឡើងវិញនូវ bibliometric ។ ភស្តុភារ ៥ (៤), ៧២.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. ដ្រូនមនុស្សធម៌៖ របៀបវារៈពិនិត្យ និងស្រាវជ្រាវ។ Internet of Things 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434 ។
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. ការស្រាវជ្រាវ Blockchain ក្នុងការថែទាំសុខភាព៖ ការពិនិត្យឡើងវិញ bibliometric និងនិន្នាការស្រាវជ្រាវបច្ចុប្បន្ន។ J. of Data, Inf. និង
គ្រប់គ្រង។ ៣ (២), ១០៩–១២៤។
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. Internet of Things research in supply chain management and logistics: a bibliometric analysis. អ៊ីនធឺណិត
នៃរឿង 12, 100318 ។
ReportLinker ឆ្នាំ 2021។ ទីផ្សារ Drones កសិកម្មសកលនឹងឈានដល់ 15.2 ពាន់លានដុល្លារអាមេរិក ដោយបន្ទប់ព័ត៌មាន YearGlobeNewswire ។ https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- ឆ្នាំ-២០២៧.html ។
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. ការក្រិតតាមខ្នាតកាមេរ៉ាកម្ដៅដែលមិនត្រជាក់ និងបង្កើនប្រសិទ្ធភាពនៃ
ដំណើរការ photogrammetry សម្រាប់កម្មវិធី UAV ក្នុងវិស័យកសិកម្ម។ ឧបករណ៍ចាប់សញ្ញា (ស្វីស) ១៧ (១០). https://doi.org/17/s10 ។
Rivera, MA, Pizam, A., 2015. វឌ្ឍនភាពក្នុងការស្រាវជ្រាវផ្នែកបដិសណ្ឋារកិច្ច៖ “ពី Rodney Dangerfield ទៅ Aretha Franklin”។ Int. J. Contempor ។ មន្ទីរពេទ្យ។ គ្រប់គ្រង។ ២៧ (៣),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. ប្រព័ន្ធញ្ញាណដែលមានមូលដ្ឋានលើ Mini-UAV សម្រាប់វាស់អថេរបរិស្ថាននៅក្នុងផ្ទះកញ្ចក់។ ឧបករណ៍ចាប់សញ្ញា 15 (2), 3334–3350 ។ https://doi.org/10.3390/s150203334 ។
Rozenberg, G., Kent, R., Blank, L., 2021. UAV កម្រិតអ្នកប្រើប្រាស់ ប្រើប្រាស់សម្រាប់ការរកឃើញ និងវិភាគគំរូនៃការចែកចាយស្មៅចុងរដូវនៅក្នុងវាលខ្ទឹមបារាំងពាណិជ្ជកម្ម។ ព្រីស។ កសិកម្ម។ ២២ (៤), ១៣១៧–១៣៣២។ https://doi.org/22/s4-1317-1332-y ។
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. គ្មានមនុស្សបើក យានជំនិះពីលើអាកាស (UAV) ដំណើរការប្រព័ន្ធកាមេរ៉ាវិសាលគមសម្រាប់កម្មវិធីព្រៃឈើ និងកសិកម្ម។ បន្ត។ SPIE - Int ។ Soc ជ្រើសរើស អេង. 8174 https://doi.org/10.1117/12.897585 ។
Sah, B., Gupta, R., Bani-Hani, D., 2021. ការវិភាគលើឧបសគ្គក្នុងការអនុវត្តភស្តុភារដ្រូន។ Int. J. Logist ។ Res. អេបផល ២៤ (៦), ៥៣១–៥៥០។ https://doi.org/24/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, SP, & Saha, HN, IOT-based drone សម្រាប់កែលម្អគុណភាពដំណាំក្នុងវិស័យកសិកម្ម។ នៅក្នុង SH
N. Chakrabarti S. (Ed.), 2018 IEEE 8th Annual Computing and Communication Workshop and Conference, CCWC 2018 (Vols. 2018-January, pp. 612–615)។ វិទ្យាស្ថាន
នៃ Electrical and Electronics Engineers Inc. doi: 10.1109/CCWC.2018.8301662។
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019. LEDCOM: ជាប្រលោមលោក និងទំនាក់ទំនងដែលមានមូលដ្ឋានលើ LED ប្រកបដោយប្រសិទ្ធភាពសម្រាប់កសិកម្មច្បាស់លាស់។ IEEE Conf. ព័ត៌មាន។ កុម្មុយនិស្ត។ បច្ចេកទេស។ ឆ្នាំ 2019, 1–5 ។ https://doi.org/10.1109/CICT48419.2019.9066177 ។
Salamí, E., Barrado, C., Pastor, E., 2014. ការពិសោធន៍លើជើងហោះហើរ UAV បានអនុវត្តចំពោះការយល់ដឹងពីចម្ងាយនៃតំបន់បន្លែ។ ការចាប់អារម្មណ៍ពីចម្ងាយ 6 (11), 11051–11081។ https://doi.org/10.3390/rs61111051 ។
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Satuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015។
ប្រព័ន្ធរូបភាពពីលើអាកាសដែលមានកម្ពស់ទាប គុណភាពបង្ហាញខ្ពស់សម្រាប់ការវាយអត្ថបទជាជួរ និងវាល៖ ការពិនិត្យឡើងវិញ។ អឺរ៉ូ។ J. Agron ។ ៧០, ១១២–១២៣។ https://doi.org/70/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. រូបភាពកម្ដៅដែលមានមូលដ្ឋានលើ UAV ដែលមានគុណភាពបង្ហាញខ្ពស់ ដើម្បីប៉ាន់ស្មាន
ភាពប្រែប្រួលភ្លាមៗ និងតាមរដូវកាលនៃស្ថានភាពទឹករុក្ខជាតិនៅក្នុងចម្ការទំពាំងបាយជូរ។ កសិកម្ម។ ការគ្រប់គ្រងទឹក។ ១៨៣, ៤៩–៥៩។ https://doi.org/183/j.agwat.49 ។
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. លើសពីការវិភាគដកស្រង់៖ គំរូសម្រាប់ការវាយតម្លៃផលប៉ះពាល់នៃការស្រាវជ្រាវ។ J. Med ។ បណ្ណាល័យ Assoc ។ ៖ JMLA 98 (1), 17–23 ។ https://doi.org/10.3163/1536-5050.98.1.008 ។
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. Earth system science related spectroscopy — an assessment. បរិស្ថាន Sens ពីចម្ងាយ។ 113, S123–S137។
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. ការត្រួតពិនិត្យប៉ារ៉ាម៉ែត្រកសិកម្មនៃដំណាំស្រូវសាលីរដូវរងាជាមួយនឹង UAV ដែលមានតម្លៃទាប
រូបភាព។ ការយល់ឃើញពីចម្ងាយ ៨ (៩). https://doi.org/8/rs9 ។
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. ការអភិវឌ្ឍន៍ និងការអនុវត្តយានជំនិះគ្មានមនុស្សបើកស្វ័យប្រវត្តិសម្រាប់សំណាកអាកាសយានិកច្បាស់លាស់ខាងលើ
វាលកសិកម្ម។ J. Field Rob ។ ២៥ (៣), ១៣៣–១៤៧។ https://doi.org/25/rob.3 ។
Shadrin, D., Menshchikov, A., Somov, A., Bornemann, G., Hauslage, J., Fedorov, M.,
បើកដំណើរការកសិកម្មច្បាស់លាស់តាមរយៈការចាប់សញ្ញាបង្កប់ជាមួយបញ្ញាសិប្បនិម្មិត។ IEEE Trans ។ ឧបករណ៍។ មាស។ ៦៩ (៧), ៤១០៣–៤១១៣។
Shakhatreh, H., Sawalmeh, AH, Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Unmanned Aerial Vehicles (UAVs): ការស្ទង់មតិលើកម្មវិធីស៊ីវិល និងបញ្ហាប្រឈមស្រាវជ្រាវសំខាន់ៗ។ IEEE Access 7,
៤៨៥៧២–៤៨៦៣៤។ https://doi.org/48572/ACCESS.48634 ។
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. ទិន្នន័យធំដែលជំរុញដោយកសិកម្ម៖ ការវិភាគទិន្នន័យធំក្នុងការបង្កាត់ពូជរុក្ខជាតិ ហ្សែន និងការប្រើប្រាស់ឧបករណ៍ចាប់សញ្ញាពីចម្ងាយ
បច្ចេកវិទ្យា ដើម្បីបង្កើនផលិតភាពដំណាំ។ Plant Phenome J. 2 (1), 1–8 ។
Sharma, BK, Chandra, G., Mishra, VP, 2019. ការវិភាគប្រៀបធៀប និងផលប៉ះពាល់នៃ UAV និង AI ក្នុងការស៊ើបអង្កេតកោសល្យវិច្ច័យ។ នៅក្នុង៖ ដំណើរការ - 2019 Amity International
សន្និសីទស្តីពីប្រាជ្ញាសិប្បនិម្មិត។ https://doi.org/10.1109/AICAI.2019.8701407 ។
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022. តួនាទីនៃបញ្ញាសិប្បនិម្មិតក្នុងការគ្រប់គ្រងខ្សែសង្វាក់ផ្គត់ផ្គង់៖ ការគូសផែនទីទឹកដី។ Int. ជ.
ផលិតផល Res. ១–២៤។ https://doi.org/1/24 ។
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan , MV ,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A., McCutchen, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. យានជំនិះគ្មានមនុស្សបើកសម្រាប់ phenotyping កម្រិតខ្ពស់ និងការស្រាវជ្រាវ agronomic ។ PLoS ONE
១១ (៧), e០១៥៩៧៨១។
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. ការចាប់យកពោតឈរខុសពីគ្នានៅទូទាំងតំបន់ស្ថិរភាពទិន្នផលដោយប្រើយន្តហោះគ្មានមនុស្សបើក
យានជំនិះ (UAV) ។ ឧបករណ៍ចាប់សញ្ញា 19 (20), 4446. https://doi.org/10.3390/s19204446.
Small, H., 1973. Co-citation in the scientific literature: a new measure of relationship between two document. J. Am. Soc ព័ត៌មាន។ វិទ្យាសាស្ត្រ។ ២៤ (៤), ២៦៥–២៦៩។
Small, H., Rorvig, ME, Lunin, LF, 1999. ការមើលឃើញវិទ្យាសាស្ត្រដោយការគូសផែនទីដកស្រង់។ J. Am. Soc ព័ត៌មាន។ វិទ្យាសាស្ត្រ។ ៥០ (៩), ៧៩៩–៨១៣។
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. ការរាប់ចំនួនសត្វពាហនៈនៅក្នុងព្រៃជាមួយនឹងរូបភាពពីលើអាកាសដែលមានទីតាំងភូមិសាស្ត្រនៅក្នុងតំបន់វាលស្មៅដ៏ធំ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ 189, 106354 https://doi.org/10.1016/j.compag.2021.106354 ។
Srivastava, K., Pandey, PC, Sharma, JK, 2020. វិធីសាស្រ្តសម្រាប់ការបង្កើនប្រសិទ្ធភាពផ្លូវក្នុងកម្មវិធីកសិកម្មច្បាស់លាស់ដោយប្រើ UAVs ។ Drones 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
Stafford, JV, 2000. ការអនុវត្តកសិកម្មច្បាស់លាស់ក្នុងសតវត្សទី 21 ។ J. Agric ។ អេង. Res. ៧៦ (៣), ២៦៧–២៧៥។
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. ការវាយតម្លៃគ្រោះរាំងស្ងួតស្រូវសាលីដោយរូបភាពចាប់សញ្ញាពីចម្ងាយដោយប្រើយានជំនិះគ្មានមនុស្សបើក។ នៅឆ្នាំ 2018 សន្និសីទត្រួតពិនិត្យចិនលើកទី 37 (CCC) ។
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018។ ការត្រួតពិនិត្យច្រែះស្រូវសាលីពណ៌លឿងដោយការរៀនពីរូបភាពពីលើអាកាស UAV ពហុspectral ។
កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៥៥, ១៥៧–១៦៦។ https://doi.org/155/j. compag.157.
Su, Y., Wang, X., 2021. ការច្នៃប្រឌិតនៃការគ្រប់គ្រងសេដ្ឋកិច្ចកសិកម្មក្នុងដំណើរការសាងសង់កសិកម្មឆ្លាតវៃដោយទិន្នន័យធំ។ កុំព្យូទ័រប្រកបដោយនិរន្តរភាព។ Inf. ប្រព័ន្ធ 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579 ។
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. ការវាយតម្លៃពីភាពប្រែប្រួលនៃប្រព័ន្ធកំដៅអ៊ីនហ្វ្រារ៉េដគ្មានមនុស្សបើក ដើម្បីរកមើលភាពតានតឹងទឹកនៅក្នុងដំបូលកប្បាស។ ឆ្លងកាត់។ ASABE 50 (6), 1955–1962 ។
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. ការរួមបញ្ចូលគ្នានៃសន្ទស្សន៍បន្លែដែលមានមូលដ្ឋានលើ RGB, គំរូផ្ទៃដំណាំ និងវិធីសាស្រ្តវិភាគរូបភាពផ្អែកលើវត្ថុសម្រាប់ការប៉ាន់ប្រមាណទិន្នផលអំពៅដោយប្រើយានជំនិះគ្មានមនុស្សបើក។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ 180, 105903 https://doi.org/10.1016/j.compag.2020.105903 ។
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. ប្រព័ន្ធគូសផែនទីអុបទិកស្រាលសម្រាប់
យន្តហោះគ្មានមនុស្សបើក - លទ្ធផលដំបូង។ នៅក្នុង៖ ឆ្នាំ 2013 សិក្ខាសាលាទី 5 ស្តីពីរូបភាព Hyperspectral និងដំណើរការសញ្ញា៖ ការវិវត្តន៍ក្នុងការចាប់សញ្ញាពីចម្ងាយ (WHISPERS), ទំព័រ 1–4 ។ https://doi.org/10.1109/WHISPERS.2013.8080721 ។
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014. ពន្លឺអុបទិក
ប្រព័ន្ធគូសផែនទី និងខ្សែសង្វាក់ដំណើរការ photogrammetric សម្រាប់យានជំនិះគ្មានមនុស្សបើក។ ការចាប់អារម្មណ៍ពីចម្ងាយ 6 (11), 11013–11030។ https://doi.org/10.3390/
rs61111013 ។
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. យុទ្ធសាស្រ្តគ្រប់គ្រងជាមុនដោយប្រើដំណើរការរូបភាព UAV និង AI ក្នុងវិស័យកសិកម្ម៖ ការពិនិត្យឡើងវិញ។ ពិភពលោក J. Eng. ១៨ (៤),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. ដំណើរការព័ត៌មានដោយប្រើការដកស្រង់ដើម្បីស៊ើបអង្កេតឥទ្ធិពលទិនានុប្បវត្តិក្នុងគណនេយ្យ។ Inf. ដំណើរការ។ គ្រប់គ្រង។ ៣៤ (២–៣), ៣៤១–៣៥៩។
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. ការស្ទង់មតិលើបណ្តាញ 5G និងផលប៉ះពាល់របស់វាលើវិស័យកសិកម្ម៖ បញ្ហាប្រឈម និងឱកាស។ កុំព្យូទ័រ។
អេឡិចត្រុង។ កសិកម្ម។ 180, 105895 https://doi.org/10.1016/j.compag.2020.105895 ។
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. ការសម្រេចចិត្តដែលជំរុញដោយទិន្នន័យក្នុងវិស័យកសិកម្មច្បាស់លាស់៖ ការកើនឡើងនៃទិន្នន័យធំនៅក្នុងប្រព័ន្ធកសិកម្ម។ J. Agric ។ ព័ត៌មានអាហារ។
៥៨ (៩), ៧៥១–៩ ។
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. ការប៉ាន់ប្រមាណទិន្នផល និងកម្ពស់រុក្ខជាតិនៃស្រូវសាលីរដូវរងាដោយប្រើ UAV- រូបភាព hyperspectral ដែលមានមូលដ្ឋាន។
ឧបករណ៍ចាប់សញ្ញា 20 (4), 1231 ។
Techy, L., Schmale III, DG, Woolsey, CA, 2010. ការសំរបសំរួលសំណាកតាមអាកាសនៃធាតុបង្កជំងឺនៅក្នុងបរិយាកាសខាងក្រោមដោយប្រើយានអវកាសគ្មានមនុស្សបើកស្វ័យប្រវត្តិពីរ។ J. Field Rob ។ ២៧ (៣), ៣៣៥–៣៤៣។ https://doi.org/27/rob.3 ។
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. ការរកឃើញ និងការចាត់ថ្នាក់នៃសត្វល្អិតសណ្តែកសៀង ដោយប្រើការសិក្សាស៊ីជម្រៅ
ជាមួយរូបភាព UAV ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៧៩, ១០៥៨៣៦។
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. ការប្រើប្រាស់ UAs សម្រាប់ការវាយតម្លៃប្រព័ន្ធកសិកម្មនៅតំបន់ដីសើមនៅតង់ហ្សានីក្នុង — និង WetSeason សម្រាប់កសិកម្មនិរន្តរភាព និងការផ្តល់នូវការពិតមូលដ្ឋានសម្រាប់ទិន្នន័យ Terra-Sar X ។ នៅក្នុង៖ ISPRS – បណ្ណសារអន្តរជាតិនៃ Photogrammetry, Remote Sensing និង Spatial Information Sciences, ទំព័រ 401–406។ https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013 ។
Thelwall, M., 2008. Bibliometrics to webometrics ។ J. ព័ត៌មាន។ វិទ្យាសាស្ត្រ។ ៣៤ (៤), ៦០៥–៦២១។
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. វិធីសាស្ត្រផ្អែកលើវត្ថុដោយស្វ័យប្រវត្តិសម្រាប់កម្រិតកម្រិតល្អបំផុតនៅក្នុងរូបភាព UAV៖ កម្មវិធីសម្រាប់ការរកឃើញបន្លែនៅក្នុងដំណាំស្មៅ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១១៤, ៤៣–៥២។ https://doi.org/114/j.compag.43 ។
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. ការត្រួតពិនិត្យ 3-D កម្រិតខ្ពស់នៃចម្ការដំណាំកសិកម្មជាមួយ បច្ចេកវិទ្យាយានគ្មានមនុស្សបើក (UAV) ។ PLoS ONE 10 (6), e0130479 ។
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´ F., 2014. ការធ្វើផែនទីពហុបណ្ដោះអាសន្ននៃប្រភាគបន្លែនៅក្នុងវាលស្រូវសាលីដើមរដូវដោយប្រើរូបភាពពី UAV ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១០៣, ១០៤–១១៣។ https://doi.org/103/j. compag.104 ។
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. ការពិនិត្យឡើងវិញលើកម្មវិធីដែលផ្អែកលើ UAV សម្រាប់កសិកម្មច្បាស់លាស់។ ព័ត៌មាន (ស្វីស) ១០ (១១). https://doi.org/10/info11 ។
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. ការធ្វើផែនការហោះហើរយន្តហោះគ្មានមនុស្សបើកឱ្យមានប្រសិទ្ធភាពសម្រាប់វាស់រចនាសម្ព័ន្ធដំណាំមែកធាងសាកវប្បកម្ម។ ISPRS J. Photogramm ។
អារម្មណ៍ពីចម្ងាយ ១៦០, ៨៣–៩៦។ https://doi.org/160/j.isprsjprs.83
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. Internet of Things in Agriculture វឌ្ឍនភាពថ្មីៗ និងបញ្ហាប្រឈមនាពេលអនាគត។ ជីវសាស្ត្រ។ អេង. ១៦៤, ៣១–៤៨។
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. Scientometric mapping of computer science research in Mexico. វិទ្យាសាស្រ្ត 105 (1), 97–114 ។
UN., 2019. ទស្សនវិស័យចំនួនប្រជាជនពិភពលោក 2019. https://population.un.org/wpp/ (ចូលប្រើនៅថ្ងៃទី 15/04/2022)។
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. លក្ខណៈនៃវាលស្រែដោយប្រព័ន្ធឧបករណ៍ចាប់សញ្ញាអុបទិកខ្នាតតូច UAVmounted ។ IEEE J. Sel. កំពូល។ អេបផល ផែនដី Obs ។
វិញ្ញាណពីចម្ងាយ ៦ (២), ៨៥១–៨៦០។ https://doi.org/6/JSTARS.2 ។ van der Merwe, D., Burchfield, DR, Witt, TD, Price, KP, Sharda, A., 851. Drones in
កសិកម្ម។ Adv. អាហ្គ្រីន។ ១៦២, ១–៣០។
Velusamy, P., Rajendran, S., Mahendran, RK, Naseer, S., Shafiq, M., Choi, J.-G., 2022។
យានអវកាសគ្មានមនុស្សបើក (UAV) ក្នុងវិស័យកសិកម្មច្បាស់លាស់៖ កម្មវិធី និងបញ្ហាប្រឈម។ ថាមពល 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. ការធ្វើផែនទី និងចំណាត់ថ្នាក់នៃជម្រកសត្វសមុទ្រដែលងាយរងគ្រោះដោយប្រព័ន្ធអេកូឡូស៊ី ដោយប្រើយន្តហោះគ្មានមនុស្សបើក
រូបភាពយានយន្ត (UAV) និងការវិភាគរូបភាពផ្អែកលើវត្ថុ (OBIA) ។ Remote Sensing 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. សន្ទស្សន៍តំបន់បៃតងពីប្រព័ន្ធពីលើអាកាសគ្មានមនុស្សបើកលើដំណាំស្រូវសាលី និងដំណាំពោត . បរិស្ថាន Sens ពីចម្ងាយ។ ១៥២, ៦៥៤–៦៦៤។ https://doi.org/152/j.rse.654 ។
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. ការដាក់ពង្រាយឧបករណ៍ចាប់សញ្ញា UAV ដែលមានមូលដ្ឋានលើអុបទិកចំនួនបួននៅលើវាលស្មៅ៖ បញ្ហាប្រឈម និង
ដែនកំណត់។ ជីវវិទ្យា ១២ (១), ១៦៣–១៧៥។ https://doi.org/12/bg-1-163-175 ។
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. Internet of underground things in precision Agriculture: ទិដ្ឋភាពស្ថាបត្យកម្ម និងបច្ចេកវិទ្យា។ អាដហុក Netw. ៨១,
១៦០–១៧៣។ https://doi.org/160/j.adhoc.173 ។
Wamba, SF, Queiroz, MM, 2021។ បញ្ញាសិប្បនិម្មិតដែលមានទំនួលខុសត្រូវជាធាតុផ្សំសម្ងាត់សម្រាប់សុខភាពឌីជីថល៖ ការវិភាគ bibliometric ការយល់ដឹង និងទិសដៅស្រាវជ្រាវ។
ព័ត៌មាន។ ប្រព័ន្ធ ខាងមុខ។ ១–១៦។
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. ការវិភាគ Bibliometric នៃនិន្នាការស្រាវជ្រាវពីចម្ងាយក្នុងការតាមដានការលូតលាស់ដំណាំ៖ ករណីសិក្សានៅក្នុងប្រទេសចិន។ ការយល់ឃើញពីចម្ងាយ ១១ (៧). https://doi.org/11/rs7 ។
White, HD, Griffith, BC, 1981. អ្នកនិពន្ធ cocitation: រង្វាស់អក្សរសិល្ប៍នៃរចនាសម្ព័ន្ធបញ្ញា។ J. Am. Soc ព័ត៌មាន។ វិទ្យាសាស្ត្រ។ ៣២ (៣), ១៦៣–១៧១។
Xiang, H., Tian, L., 2011. ការអភិវឌ្ឍន៍ប្រព័ន្ធចាប់សញ្ញាពីចម្ងាយកសិកម្មដែលមានតម្លៃទាបដោយផ្អែកលើយានជំនិះគ្មានមនុស្សបើកស្វ័យប្រវត្តិ (UAV) ។ ជីវសាស្ត្រ។ អេង. ១០៨ (២), ១៧៤–១៩០។ https://doi.org/108/j.biosystemseng.2 ។
Xie, C., Yang, C., 2020. ការពិនិត្យឡើងវិញលើលក្ខណៈ phenotyping កម្រិតខ្ពស់របស់រុក្ខជាតិដោយប្រើឧបករណ៍ចាប់សញ្ញា UAV ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ ១៧៨, ១០៥៧៣១ https://doi.org/178/j.
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. យានជំនិះគ្មានមនុស្សបើកសម្រាប់កម្មវិធីចាប់សញ្ញាពីចម្ងាយ—ការពិនិត្យឡើងវិញ។ ការយល់ឃើញពីចម្ងាយ ១១ (១២). https://doi.org/11/
rs11121443 ។
Yeom, S., 2021. ការផ្លាស់ទីមនុស្សតាមដាន និងការដកបទមិនពិតចេញជាមួយរូបភាពកម្ដៅអ៊ីនហ្វ្រារ៉េដដោយ multirotor ។ Drones 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. ការប្រៀបធៀបនៃការប៉ាន់ប្រមាណប៉ារ៉ាម៉ែត្រដំណាំដោយប្រើរូបភាព ពី UAV-mounted
ឧបករណ៍ចាប់សញ្ញា hyperspectral ថតរូប និងកាមេរ៉ាឌីជីថលនិយមន័យខ្ពស់។ Remote Sensing 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. ការប៉ាន់ប្រមាណនៃស្រូវសាលីរដូវរងានៅពីលើដីដោយប្រើយានជំនិះគ្មានមនុស្សបើក- រូបថតដែលមានមូលដ្ឋាន
ឧបករណ៍ចាប់សញ្ញា hyperspectral និងកម្ពស់ដំណាំដែលបានកែលម្អម៉ូដែល។ ការយល់ឃើញពីចម្ងាយ ៩ (៧). https://doi.org/9/rs7 ។
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. ការប្រើប្រាស់យានជំនិះគ្មានមនុស្សបើកទម្ងន់ស្រាល ដើម្បីតាមដានការស្ដារព្រៃត្រូពិច។ ប៊ីយ៉ូល។
អភិរក្ស។ ១៨៦, ២៨៧–២៩៥។ https://doi.org/186/j.biocon.287 ។ Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, ឆ្នាំ 295។
វេទិកា IoT កសិកម្មឆ្លាតវៃ ផ្អែកលើគែម និងពពក។ ជីវសាស្ត្រ។ អេង. ១៧៧,
4-17 ។
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. បរិមាណកម្ពស់ដើមឈើ ដោយប្រើរូបភាពដែលមានភាពច្បាស់ខ្ពស់ ដែលទទួលបានពីយន្តហោះគ្មានមនុស្សបើក
យានជំនិះ (UAV) និងវិធីសាស្រ្តបង្កើតរូបថត 3D ដោយស្វ័យប្រវត្តិ។ អឺរ៉ូ។ J. Agron ។ ៥៥, ៨៩–៩៩។ https://doi.org/55/j.eja.89 ។
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. រូបភាពផ្អែកលើរូបភាពនៃអាំងតង់ស៊ីតេចេញផ្កានៅក្នុងដំណាំរដូវត្រជាក់។ ឧបករណ៍ចាប់សញ្ញា 20 (5), 1450. https://doi.org/10.3390/s20051450 ។
Zhang, C., Kovacs, JM, 2012. ការអនុវត្តប្រព័ន្ធអាកាសគ្មានមនុស្សបើកខ្នាតតូចសម្រាប់កសិកម្មច្បាស់លាស់៖ ការពិនិត្យឡើងវិញ។ ព្រីស។ កសិកម្ម។ ១៣ (៦), ៦៩៣–៧១២។ https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. ការគូសផែនទីភាពតានតឹងទឹកពោតដោយផ្អែកលើការចាប់សញ្ញាពីចម្ងាយពហុវិសាលភាព UAV ។ ការយល់ឃើញពីចម្ងាយ 11 (6), 605 ។
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz´ alez-Moreno, P., Ma, H., Ye, H., Sobeih , T., 2019. វិធីសាស្រ្តដែលផ្អែកលើការរៀនសូត្រជ្រៅសម្រាប់ការច្រេះពណ៌លឿងដោយស្វ័យប្រវត្តិ
ការរកឃើញជំងឺពីរូបភាព UAV កម្រិតច្បាស់ខ្ពស់ ការចាប់អារម្មណ៍ពីចម្ងាយ ១១ (១៣), ១៥៥៤។
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. ការរកឃើញ និងការរើសអើងជំងឺ និងសត្វល្អិតនៃរុក្ខជាតិតែដោយប្រើរូបភាព hyperspectral រួមបញ្ចូលគ្នាជាមួយនឹងការវិភាគរលក។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ 193, 106717 https://doi.org/10.1016/j. compag.2022.106717 ។
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Entropy បានណែនាំការសម្របតាមដែនសត្រូវសម្រាប់ការបែងចែករូបភាពពីលើអាកាស។ IEEE Trans ។ ជី
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. ការរកឃើញភូគព្ភសាស្ត្រស្រូវតាមរយៈការវិភាគស៊េរីពេលវេលានៃវិសាលគមដី ទិន្នន័យលិបិក្រម។ ដំណាំចំការ Res. ១៩៨, ១៣១–១៣៩។ https://doi.org/198/j.fcr.131 ។
Zheng, J., Yang, W., 2018. ការរចនាប្រព័ន្ធគ្រាប់ពូជលេចធ្លាយកសិកម្មច្បាស់លាស់ដោយផ្អែកលើឧបករណ៍ចាប់សញ្ញាឥតខ្សែ។ Int. J. Online Eng. ១៤ (០៥), ១៨៤.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. ការវិភាគអំពីការផ្លាស់ប្តូរកម្ពស់រុក្ខជាតិរបស់ពោតលីងដោយប្រើប្រាស់ទិន្នន័យ UAV-LiDAR ។ កសិកម្ម 10 (5), 146. https://
doi.org/10.3390/agriculture10050146 ។
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: កម្មវិធីវិភាគរូបភាពពោតដោយប្រើប្រាស់ការរៀនស៊ីជម្រៅសម្រាប់ការវាយអក្សររុក្ខជាតិដែលមានទិន្នផលខ្ពស់ . វិធីសាស្រ្តដាំ 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. ការទស្សន៍ទាយទិន្នផលគ្រាប់ធញ្ញជាតិក្នុង ស្រូវដោយប្រើបន្លែពហុបណ្ដោះអាសន្ន
សន្ទស្សន៍ពី UAV-based multispectral និងរូបភាពឌីជីថល។ ISPRS J. Photogramm ។ អារម្មណ៍ពីចម្ងាយ ១៣០, ២៤៦–២៥៥។ https://doi.org/130/j.isprsjprs.246 ។
Zhou, Y., Xie, Y., Shao, L., 2016. ការក្លែងធ្វើបច្ចេកវិទ្យាស្នូលនៃប្រព័ន្ធឃ្លាំមើលផ្ទះកញ្ចក់ដោយផ្អែកលើបណ្តាញឧបករណ៍ចាប់សញ្ញាឥតខ្សែ។ Int. J. Online Eng. ១២ (០៥),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. ការវាយតម្លៃសម្រាប់ភាពតានតឹងទឹកដំណាំជាមួយនឹងរូបភាពកម្ដៅអ៊ីនហ្វ្រារ៉េដក្នុងវិស័យកសិកម្មច្បាស់លាស់៖ ការពិនិត្យឡើងវិញ
និងការរំពឹងទុកនាពេលអនាគតសម្រាប់កម្មវិធីសិក្សាស៊ីជម្រៅ។ កុំព្យូទ័រ។ អេឡិចត្រុង។ កសិកម្ម។ 182, 106019 https://doi.org/10.1016/j.compag.2021.106019។

{kind=link}